
Citation: Dzedzickis, A.;
Subaˇci
¯
ut
˙
e-Žemaitien
˙
e, J.; Šutinys, E.;
Samukait
˙
e-Bubnien
˙
e, U.; Buˇcinskas,
V. Advanced Applications of
Industrial Robotics: New Trends and
Possibilities. Appl. Sci. 2022, 12, 135.
https://doi.org/10.3390/
app12010135
Academic Editor: Luis Gracia
Received: 9 November 2021
Accepted: 19 December 2021
Published: 23 December 2021
Publisher’s Note: MDPI stays neutral
with regard to jurisdictional claims in
published maps and institutional affil-
iations.
Copyright: © 2021 by the authors.
Licensee MDPI, Basel, Switzerland.
This article is an open access article
distributed under the terms and
conditions of the Creative Commons
Attribution (CC BY) license (https://
creativecommons.org/licenses/by/
4.0/).
applied
sciences
Review
Advanced Applications of Industrial Robotics: New Trends
and Possibilities
Andrius Dzedzickis * , Jurga Subaˇci
¯
ut
˙
e-Žemaitien
˙
e, Ernestas Šutinys, Urt
˙
e Samukait
˙
e-Bubnien
˙
e *
and Vytautas Buˇcinskas
Department of Mechatronics, Robotics, and Digital Manufacturing, Vilnius Gediminas Technical University,
J. Basanaviciaus Str. 28, LT-03224 Vilnius, Lithuania; [email protected] (J.S.-Ž.);
[email protected] (E.Š.); [email protected] (V.B.)
* Correspondence: [email protected] (A.D.); [email protected] (U.S.-B.)
Abstract:
This review is dedicated to the advanced applications of robotic technologies in the
industrial field. Robotic solutions in areas with non-intensive applications are presented, and
their implementations are analysed. We also provide an overview of survey publications and
technical reports, classified by application criteria, and the development of the structure of existing
solutions, and identify recent research gaps. The analysis results reveal the background to the
existing obstacles and problems. These issues relate to the areas of psychology, human nature, special
artificial intelligence (AI) implementation, and the robot-oriented object design paradigm. Analysis
of robot applications shows that the existing emerging applications in robotics face technical and
psychological obstacles. The results of this review revealed four directions of required advancement
in robotics: development of intelligent companions; improved implementation of AI-based solutions;
robot-oriented design of objects; and psychological solutions for robot–human collaboration.
Keywords: industrial robots; collaborative robots; machine learning in robotics; computer vision
1. Introduction
The industrial robotics sector is one of the most quickly growing industrial divisions, pro-
viding standardised technologies suitable for various automation processes. In ISO 8373:2012
standard [
1
], an industrial robot is defined as an automatically controlled, reprogrammable,
multipurpose manipulator, programmable in three or more axes, which can be stationary or
mobile for use in industrial automation applications. However, the same standard creates an
exception for wider implementation. It states that the robot’s classification into industrial,
service, or other types is undertaken according to its intended application.
According to the International Federation of Robotics (IRF) [
2
], 373,000 industrial
robots were sold globally in 2019. In 2020 the total number of industrial robots operating
in factories globally reached 2.7 million. Successful application of industrial robots, their
reliability and availability, and the active implementation of the Industry 4.0 concept have
stimulated growing interest in robots’ optimisation and the research of new implemen-
tations in various areas, especially in non-manufacturing and non-typical applications.
According to one of the biggest scientific databases, ScienceDirect [
3
], more than 4500 scien-
tific papers were published in 2019 using the term “Industrial robot” as a keyword and,
in 2020, the number of papers with a similar interest and research direction increased to
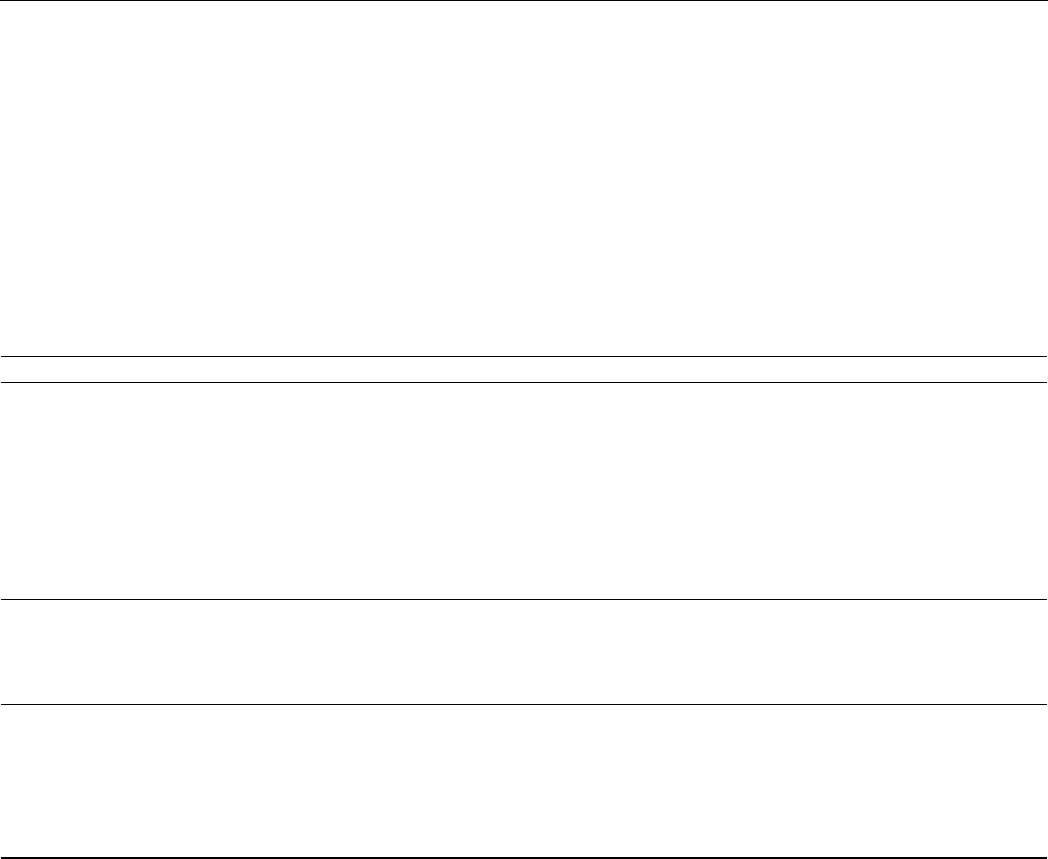
5300. Figure 1 shows the annual ratio of new robot installations vs. the number of scientific
publications in the ScienceDirect database. Scientific interest in this field is based on a
steady increase in the number of publications, independent of the political, economic, and
social factors affecting the market for new robots.
Appl. Sci. 2022, 12, 135. https://doi.org/10.3390/app12010135 https://www.mdpi.com/journal/applsci

Appl. Sci. 2022, 12, 135 2 of 25
Appl. Sci. 2022, 11, x FOR PEER REVIEW 2 of 26
Figure 1. The annual ratio of publications to newly installed industrial robots.
This review assesses the recent development trends in robotics, and identifies some
of the most relevant ethical, technological and, scientific uncertainties limiting wider im-
plementation possibilities. This literature review is focused mainly on the 2018–2021 ap-
plications of industrial robots in fields in which endorsement of robotisation has tradi-
tionally been weak (i.e., medical applications, the food industry, agricultural applications,
and the civil engineering industry). It also includes fundamental issues such as human–
machine interaction, object recognition, path planning, and optimisation.
For this review, main keywords, such as industrial robots, collaborative robots, and
robotics, were used to survey published papers over a four-year period. Because this is a
widely researched and dynamic area, the review focused on a relatively short time period
and encompassed the most recent sources to ensure the analysis conducted was novel.
According to the search request, Google Scholar returned 79,500 results, from which
115 publications were selected. The surveyed articles were selected according to the di-
rection of the literature review and the indicated criteria (application area, novelty and
significance of achievements, reliability, and feasibility of results).
Despite the ever-growing field of automation in daily life and society’s accustomed
use of smart devices, non-typical applications of robotics are still often viewed with con-
siderable scepticism. The most common myth about robots is that they will occupy human
workplaces, leaving human workers without a source of livelihood. Nevertheless, the re-
search provided in [4], which aimed to evaluate the public outcry about robots taking over
jobs in electronics and textiles industries in Japan, proved that such a point of view is
incorrect. Evaluation of the use of the robots based on their number and real implementa-
tion price determined that implementation of robots positively affects productivity, which
results in a positive impact for the most vulnerable workers in society, i.e., women, part-
time workers, high-school graduates, and aged persons.
Technological and scientific uncertainties also require a special approach. Each ro-
botisation task is unique in its own way. These tasks often require the use of individual
tools, the creation of a corresponding working environment, the use of additional sensors
or measurement systems, and the implementation of complex control algorithms to ex-
pand the functionalities or improve the characteristics of standard robots. In most appli-
cations, industrial robots form bigger units as robotic cells or automated/autonomous
manufacturing lines. As a result, the robotisation of even a relatively simple task becomes
a complex solution requiring a systemic approach.
Moreover, the issue of implementing an industrial robot remains complicated by its
interdisciplinary nature: proper organisation of the work cycle is the object of manufac-
turing management sciences; the design of grippers and related equipment lies within the
field of mechanical engineering; and the integration of all devices into a united system,
sensor data analysis and whole system control are the objects of mechatronics.
0
2000
4000
6000
8000
0
100
200
300
400
500
2012 2013 2014 2015 2016 2017 2018 2019 2020 2021
Publications
Instaliations '000 of units
Installations Publications
Figure 1. The annual ratio of publications to newly installed industrial robots.
This review assesses the recent development trends in robotics, and identifies some of
the most relevant ethical, technological and, scientific uncertainties limiting wider imple-
mentation possibilities. This literature review is focused mainly on the 2018–2021 applica-
tions of industrial robots in fields in which endorsement of robotisation has traditionally
been weak (i.e., medical applications, the food industry, agricultural applications, and the
civil engineering industry). It also includes fundamental issues such as human–machine
interaction, object recognition, path planning, and optimisation.
For this review, main keywords, such as industrial robots, collaborative robots, and
robotics, were used to survey published papers over a four-year period. Because this is a
widely researched and dynamic area, the review focused on a relatively short time period
and encompassed the most recent sources to ensure the analysis conducted was novel.
According to the search request, Google Scholar returned 79,500 results, from which
115 publications were selected. The surveyed articles were selected according to the
direction of the literature review and the indicated criteria (application area, novelty and
significance of achievements, reliability, and feasibility of results).
Despite the ever-growing field of automation in daily life and society’s accustomed
use of smart devices, non-typical applications of robotics are still often viewed with consid-
erable scepticism. The most common myth about robots is that they will occupy human
workplaces, leaving human workers without a source of livelihood. Nevertheless, the
research provided in [
4
], which aimed to evaluate the public outcry about robots taking
over jobs in electronics and textiles industries in Japan, proved that such a point of view
is incorrect. Evaluation of the use of the robots based on their number and real imple-
mentation price determined that implementation of robots positively affects productivity,
which results in a positive impact for the most vulnerable workers in society, i.e., women,
part-time workers, high-school graduates, and aged persons.
Technological and scientific uncertainties also require a special approach. Each roboti-
sation task is unique in its own way. These tasks often require the use of individual tools,
the creation of a corresponding working environment, the use of additional sensors or
measurement systems, and the implementation of complex control algorithms to expand
the functionalities or improve the characteristics of standard robots. In most applications,
industrial robots form bigger units as robotic cells or automated/autonomous manufactur-
ing lines. As a result, the robotisation of even a relatively simple task becomes a complex
solution requiring a systemic approach.
Moreover, the issue of implementing an industrial robot remains complicated by its in-
terdisciplinary nature: proper organisation of the work cycle is the object of manufacturing
management sciences; the design of grippers and related equipment lies within the field of
mechanical engineering; and the integration of all devices into a united system, sensor data
analysis and whole system control are the objects of mechatronics.
This review focuses on the hardware and software methods used to implement in-
dustrial robots in various applications. The aim was to systematically classify the newest
achievements in industrial robotics according to application fields without strong robotisa-

Appl. Sci. 2022, 12, 135 3 of 25
tion traditions. The analysis of this study was also undertaken from a multidisciplinary
perspective, and considers the implementation of computer vision and machine learning
for robotic applications.
2. Main Robotisation Strategies
According to the human–robot cooperation type, a review of the most recent trends in
industrial robotics applications indicates two main robotisation strategies: classical and
modern. In industrial robotics, five typical levels of human–robot cooperation are defined
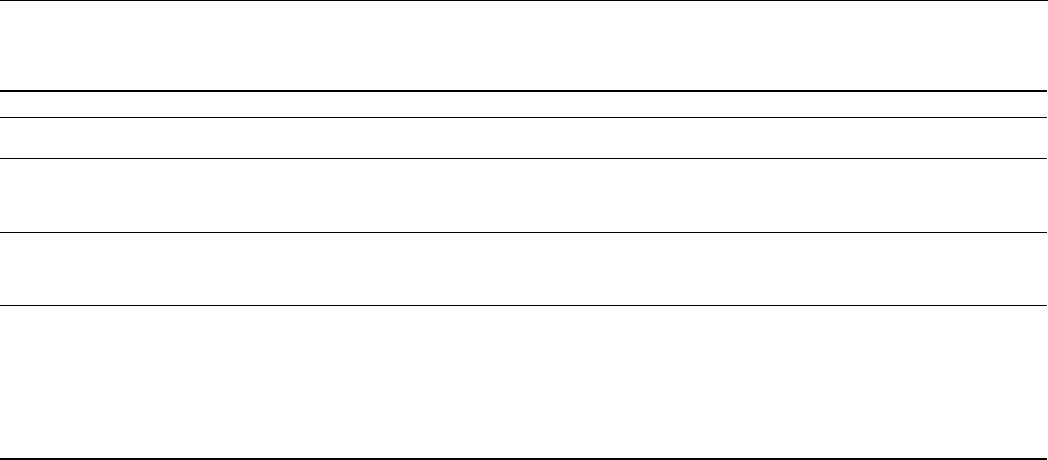
(Figure 2): (i) no collaboration; (ii) coexistence; (iii) synchronisation; (iv) cooperation;
(v) collaboration [5].
Appl. Sci. 2022, 11, x FOR PEER REVIEW 3 of 26
This review focuses on the hardware and software methods used to implement in-
dustrial robots in various applications. The aim was to systematically classify the newest
achievements in industrial robotics according to application fields without strong robot-
isation traditions. The analysis of this study was also undertaken from a multidisciplinary
perspective, and considers the implementation of computer vision and machine learning
for robotic applications.
2. Main Robotisation Strategies
According to the human–robot cooperation type, a review of the most recent trends
in industrial robotics applications indicates two main robotisation strategies: classical and
modern. In industrial robotics, five typical levels of human–robot cooperation are defined
(Figure 2): (i) no collaboration; (ii) coexistence; (iii) synchronisation; (iv) cooperation; (v)
collaboration [5].
The classical strategy encompasses the first cooperation level (Figure 2a). It is based
on the approach that robots must limit humans in their workplace by creating closed robot
cells in which human activity is unacceptable; if a human must enter the robot’s work-
space, the robot must be stopped. This approach uses various safety systems to detect and
prevent human access to the robot’s workspace. The modern strategy includes the remain-
ing four cooperation levels (Figure 2 b–e). This is based on an opposing approach, and
states that robots and humans can work in one workplace and collaborate. Such an ap-
proach creates additional requirements for robot’s design, control, and sensing systems.
Robots adapted to operate in conjunction with human workers are usually defined as col-
laborative robots or cobots.
Figure 2. Human–robot cooperation levels [5]: (a) no collaboration, the robot remains inside a closed
work cell; (b) coexistence, removed cells, but separate workspaces; (c) synchronisation, sharing of
the workspace, but never at the same time; (d) cooperation, shared task and workspace, no physical
interaction; (e) collaboration, operators and robots exchange forces.
2.1. Classical Robotisation Strategy
Following the issuing of the patent for the first industrial robot to George Devol in
1954, the classical robotisation strategy has indicated that robots should replace human
Figure 2.
Human–robot cooperation levels [
5
]: (
a
) no collaboration, the robot remains inside a closed
work cell; (
b
) coexistence, removed cells, but separate workspaces; (
c
) synchronisation, sharing of
the workspace, but never at the same time; (
d
) cooperation, shared task and workspace, no physical
interaction; (e) collaboration, operators and robots exchange forces.
The classical strategy encompasses the first cooperation level (Figure 2a). It is based
on the approach that robots must limit humans in their workplace by creating closed robot
cells in which human activity is unacceptable; if a human must enter the robot’s workspace,
the robot must be stopped. This approach uses various safety systems to detect and prevent
human access to the robot’s workspace. The modern strategy includes the remaining four
cooperation levels (Figure 2b–e). This is based on an opposing approach, and states that
robots and humans can work in one workplace and collaborate. Such an approach creates
additional requirements for robot’s design, control, and sensing systems. Robots adapted
to operate in conjunction with human workers are usually defined as collaborative robots
or cobots.
2.1. Classical Robotisation Strategy
Following the issuing of the patent for the first industrial robot to George Devol in
1954, the classical robotisation strategy has indicated that robots should replace human
workers in routine tasks and unhealthy workplaces. This strategy suggests that humans
should be removed from the robot’s workspace (Figure 3a). Direct cooperation between the

Appl. Sci. 2022, 12, 135 4 of 25
robot and humans is forbidden due to the potential danger for human health and safety.
This approach was later expanded to encompass accuracy, reliability, productivity, and
economic factors.
Appl. Sci. 2022, 11, x FOR PEER REVIEW 4 of 26
workers in routine tasks and unhealthy workplaces. This strategy suggests that humans
should be removed from the robot’s workspace (Figure 3a). Direct cooperation between
the robot and humans is forbidden due to the potential danger for human health and
safety. This approach was later expanded to encompass accuracy, reliability, productivity,
and economic factors.
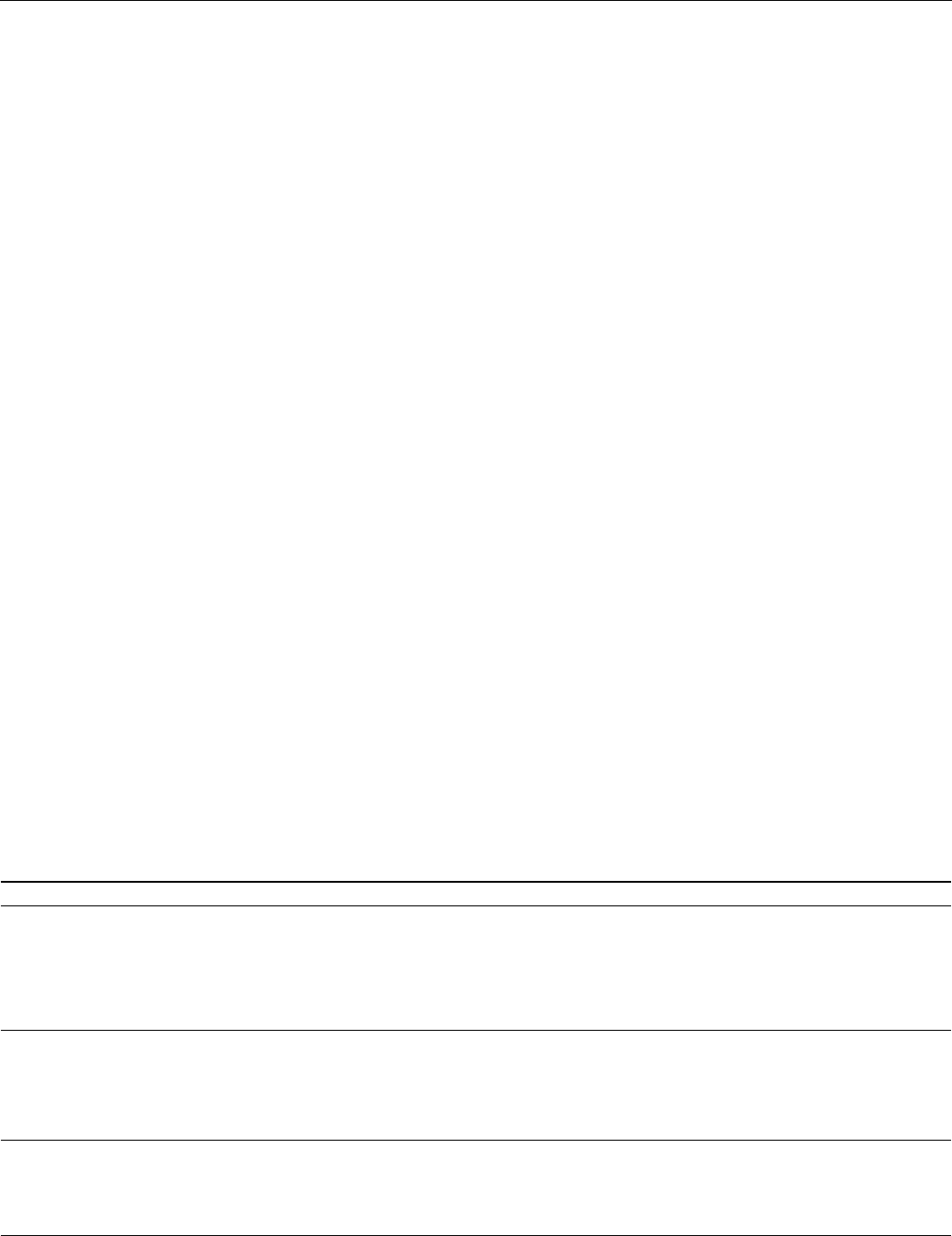
Figure 3. Comparison of the operating environment: (a) industrial robots (adapted from [6]); (b)
collaborative robots (adapted from [7]).
Research provided in [8] analyses the possibilities of implementing service robots in
hotels from social, economic, and technical perspectives. The authors indicated the need
to evaluate hotel managers’ perceptions regarding the advantages and disadvantages of
service robots, compared to human workers, as the primary goal of their research,
whereas determining tasks suitable for robotisation was of secondary importance. This
approach confirms the assumption that the implementation of robotics in non-traditional
applications is often limited not by technological issues, but by the company managers’
attitudes. Analysing questionnaires completed by 79 hotel managers, it was concluded
that robots have an advantage over human employees due to better data processing capa-
bilities, work speed, protection of personal data, and fewer mistakes. The main disad-
vantages of robots were listed as: lack of capability to provide personalised service; ina-
bility to handle complaints; lack of friendliness and politeness; inability to implement a
special request that goes beyond their programming; and the lack of understanding of
emotions.
Despite the common doubts, implementing automation and robotic solutions has a
positively impact in many cases. The study provided in [9] analysed the general impact
of robot implementation in workplaces for packing furniture parts. The analysis focused
on the ergonomic perspective, and found that implementation of robotics eliminates the
risk of work-related musculoskeletal disorders. A similar study [8] analysed the design,
engineering, and testing of adaptive automation assembly systems to increase automation
levels, and to complement human workers’ skills and capabilities in assembling industrial
refrigerators. This study showed that automated assembly process productivity could be
increased by more than 79%. Implementing an industrial robot instead of partial automa-
tion would likely result in an even more significant increase in productivity. Research
comparing human capabilities with automated systems is also described in [10]. The au-
thors compared human and automated vision recognition system capabilities to recognise
and evaluate forest or mountain trails from a single monocular image acquired from the
Figure 3.
Comparison of the operating environment: (
a
) industrial robots (adapted from [
6
]);
(b) collaborative robots (adapted from [7]).
Research provided in [
8
] analyses the possibilities of implementing service robots
in hotels from social, economic, and technical perspectives. The authors indicated the
need to evaluate hotel managers’ perceptions regarding the advantages and disadvantages
of service robots, compared to human workers, as the primary goal of their research,
whereas determining tasks suitable for robotisation was of secondary importance. This
approach confirms the assumption that the implementation of robotics in non-traditional
applications is often limited not by technological issues, but by the company managers’
attitudes. Analysing questionnaires completed by 79 hotel managers, it was concluded that
robots have an advantage over human employees due to better data processing capabilities,
work speed, protection of personal data, and fewer mistakes. The main disadvantages of
robots were listed as: lack of capability to provide personalised service; inability to handle
complaints; lack of friendliness and politeness; inability to implement a special request that
goes beyond their programming; and the lack of understanding of emotions.
Despite the common doubts, implementing automation and robotic solutions has a
positively impact in many cases. The study provided in [
9
] analysed the general impact
of robot implementation in workplaces for packing furniture parts. The analysis focused
on the ergonomic perspective, and found that implementation of robotics eliminates the
risk of work-related musculoskeletal disorders. A similar study [
8
] analysed the design,
engineering, and testing of adaptive automation assembly systems to increase automation
levels, and to complement human workers’ skills and capabilities in assembling industrial
refrigerators. This study showed that automated assembly process productivity could be
increased by more than 79%. Implementing an industrial robot instead of partial automation
would likely result in an even more significant increase in productivity. Research comparing
human capabilities with automated systems is also described in [
10
]. The authors compared
human and automated vision recognition system capabilities to recognise and evaluate
forest or mountain trails from a single monocular image acquired from the viewpoint of a
robot travelling on the trail. The obtained results showed that a deep neural network-based
system, trained on a large dataset, performs better than humans.
Neural network-based algorithms can also be used to control industrial robots to
address imperfections in their mechanical systems, which typically behave as non-linear

Appl. Sci. 2022, 12, 135 5 of 25
dynamic systems due to a large number of uncertainties. The research presented in [
11
,
12
]
provides neural network-based methods for advanced control of robot movements. In [
11
],
a perspective non-linear model-based predictive control method for robotic manipulators,
which minimises the settling time and position overshoot of each joint, is provided.
The classic strategy is well suited to robotisation of mass production processes in
various fields, and its main advantages are clear requirements for work process organi-
sation, robotic cell design, and installation; the availability of a large variety of standard
equipment and typical partial solutions; and higher productivity and reliability compared
to the cases where human workers perform the same tasks. The main disadvantages are
insufficient flexibility, unsuitability for unique production, and high economic costs when
it is necessary to adapt the existing robotic cell to a new product or process. Applying a
modern robotisation strategy can avoid some of these disadvantages (or at least minimise
their impact).
2.2. Modern Robotisation Strategy
The modern robotisation strategy is based on implementing collaborative robots
(cobots). According to [
13
], the definition of cobot was first used in a 1999 US patent [
14
]
and was intended for “an apparatus and method for direct physical integration between
a person and a general-purpose manipulator controlled by a computer.” It was the result
of the efforts of General Motors to implement robotics in the automotive sector to help
humans in assembly operations. The first lightweight cobot, LBR3, designed by a German
robotics company, was introduced in 2004 [
13
]. This has led to the broader development of
a modern robotics strategy and new manufacturers in the market. In 2008, the Danish man-
ufacturer Universal Robots released the UR5, a cobot that could safely operate alongside
the employees, eliminating the need for safety caging or fencing (Figure 3b). This launched
a new era of flexible, user-friendly, and cost-efficient collaborative robots [
13
], and resulted
in the current situation, in which all of the major robot manufacturers have at least a few
cobot models in their product range.
The fourth industrial revolution—Industry 4.0—significantly fostered the development
of cobot’s technologies, because the concept fitted well with Industry 4.0 content, allowing
human–robot collaboration to be realised and being suitable for flexible manufacturing
systems. Contrary to typical industrial robots, next-generation robotics uses artificial intel-
ligence (AI) to collaboratively perform tasks and is suitable for uncontrolled/unpredictable
environments [
15
]. Moreover, due to favourable conditions (advances in AI, sensing tech-
nologies, and computer vision), collaborative industrial robots have become significantly
smarter, showing the potential of reliable and secure cooperation, and increasing the pro-
ductivity and efficiency of the involved processes [
15
]. However, it should be noted that
Industry 4.0 fostered not only the widespread of robotics, but also posed new challenges.
When developing highly automated systems, most of the equipment is related through the
Internet of Things (IoT) or other communication technologies. Therefore, cybersecurity and
privacy protection of processes used to monitor and control data [
16
,
17
] must be considered.
The issue of data protection is also becoming more critical due to the latest communica-
tion technologies, such as 5G and 6G [
18
]. These technologies allow the development
of standardised wireless communication networks for various control levels (single-cell,
production line, factory, network of factories) and, at the same time, makes systems more
sensitive to external influences. The main impact of Industry 4.0 and new communication
technologies on industrial robots is that their controllers have an increasing number of
connections, functions, and protocols to communicate with other “smart” devices.
The study presented in [
19
] analyses the possibilities of human–robot collaboration
in aircraft assembly operations. The benefits of human–robot cooperation were examined
in terms of the productivity increase and the levels of satisfaction of the human workers.
The obtained results showed that humans and robots could simultaneously work safely
in a common area without any physical separation, and significantly reduce time and
costs compared with manual operations. Moreover, assessment of employee opinions

Appl. Sci. 2022, 12, 135 6 of 25
showed that most employees positively evaluated the implementation of collaborative
robots. Nevertheless, employee attitudes depend on their practical experience: it was
noticed that experts felt more confident than beginners. This can be explained by the fact
that experts better understand the overall manufacturing process and are more accustomed
to operating with various equipment.
Compared to traditional industrial robots, cobots have more user-friendly control
features and wider teaching options. A new assembly strategy was described in a previous
study [
20
], in which a cobot learnt skills from manual teaching to perform peg-in-hole
automatic assembly when the geometric profile and material elastic parameters of parts
were inaccurate. The results showed that the manual assembly process could be analysed
mathematically, splitting it into a few stages and implementing it as a model in robot
control. Using an Elite EC75 manipulator (Elite Robot, Suzhou, CN, an assembly time
of less than 20 s was achieved, ensuring a 100% success rate from 30 attempts when the
relative error between the peg and hole was
±
4.5 mm, and the clearance between the peg
and the hole was 0.18 mm.
As a result of the development of sensor and imaging technologies, new applications
in robotics are emerging, especially in human–robot collaboration. In [
21
], detailed research
focused on identifying the main strengths and weaknesses of augmented reality (AR)
in industrial robots applications. The analysis shows that AR is mainly used to control
and program robotic arms, visualise general tasks or robot information, and visualise the
industrial robot workspace. Results of the analysis indicate that AR systems are faster
than traditional approaches; users have greater appreciation for AR systems in terms of
likeability and usability; and AR seems to reduce physical workload, whereas the impact
on mental workload depends on the interaction interface [
16
]. Nevertheless, industrial
implementation of AR is still limited by insufficient accuracy, occlusion problems, and the
limited field of view of wearable AR devices.
A summary of the analysed robotisation strategies indicates that they both have their
specific implementation fields. The classical strategy is well suited to strictly controlled
environments. The modern strategy ensures more flexible operation and is suitable for
non-predictable environments. Nevertheless, it is necessary to note that the strict line
between these strategies has gradually disappeared due to advances in sensing technolo-
gies, artificial intelligence, and computer vision. A typical industrial robot equipped with
modern sensing and control systems can operate similarly to a cobot. According to [
22
], col-
laborative regimes can be realised using industrial robots, laser sensors, and vision systems,
or controller alteration if compliance with the ISO/TS 15066 standard—which specifies
parameters and materials adapted to safe activities with and near humans—is ensured [
23
].
This standard defines four main classes of safety requirements for collaborative robots:
safety-rated monitored stop; hand-guiding; speed and separation monitoring; and power
and force limiting.
In addition, it is essential to mention that all improvements and advances in robotics
can be classified into two main types: universal and application dependent. The remaining
part of this article reviews and classifies the latest advances in robotics according to the
areas of their implementation.
3. Recent Achievements in Industrial Robotics Classified according to Implementation Area
3.1. Human–Machine Interaction
To date, manual human work has been often replaced by robotic systems in industry.
However, within complex systems, the interaction between humans and machines/robots
(HMI) still needs to occur. HMI is an area of research related to the development of robotic
systems based on understanding, evaluation, and analysis, and this system combines vari-
ous forms of cooperation or interaction with humans. Interaction requires communication
between robots and humans, and human communication and collaboration with the robot
system can take many forms. However, these forms are greatly influenced by whether
the human is close to the robot and the context being used: (i) human–computer context—
Appl. Sci. 2022, 12, 135 7 of 25
keyboard, buttons, etc.; (ii) real procedures context—haptics, sensors; and (iii) close and
exact interaction. Therefore, both human and robot communication or interaction can
be divided into two main categories: remote interaction and exact interaction. Remote
interaction takes place by remote operation or supervised control. Close interaction takes
place by operation with an assistant or companion. Close interaction may include physical
interaction. Because close interactions are the most difficult, it is crucial to consider a
number of aspects to ensure a successful collaboration, i.e., a real-time algorithm, “touch”
detection and analysis, autonomy, semantic understanding capabilities, and AI-aided antic-
ipation skills. A summary of the relevant research focused on improving and developing
HMI methods is provided in Table 1.
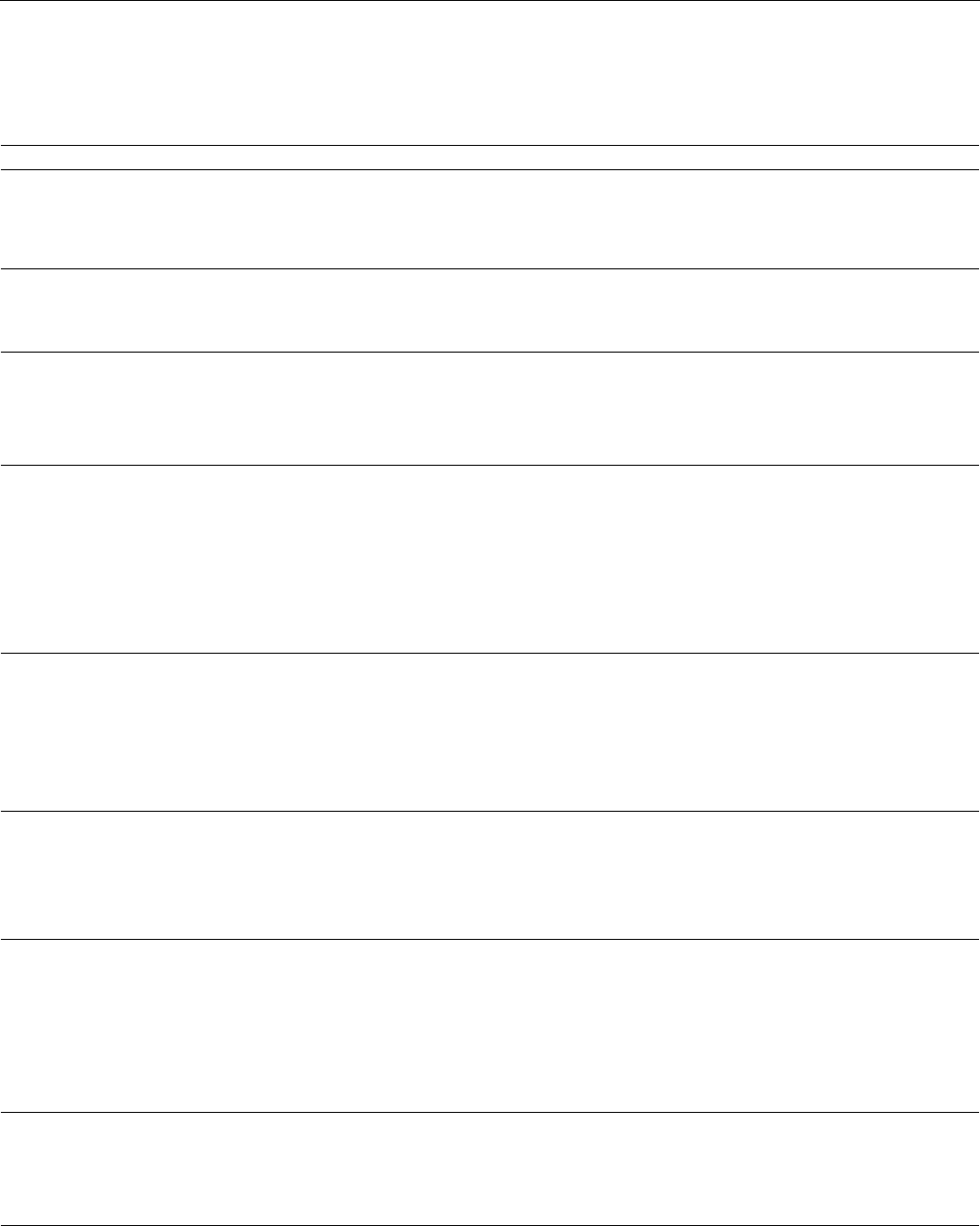
Table 1. Research focused on human–machine interaction.
Objective Technology Approach Improvement Ref.
To improve flexibility,
productivity and quality of a
multi-pass gas tungsten arc
welding (GTAW) process
performed by a collaborative
robot.
A haptic interface.
6-axis robotic arm (Mitsubishi
MELFA RV-13FM-D).
The end effector with GTAW
torch.
A monitoring camera (Xiris
XVC-1000).
A Load Cell (ATI Industrial
Automation Mini45-E) to
evaluate tool force
interactions with work pieces.
A haptic-based approach is
designed and tested in a
manufacturing scenario
proposing light and low-cost
real-time algorithms for
“touch” detection.
Two main criteria were analysed to assess
the performance: the 3-Sigma rule and
the Hampel identifier. Experimental
results showed better performance of the
3-Sigma rule in terms of precision
percentage (mean value of 99.9%) and
miss rate (mean value of 10%) concerning
the Hampel identifier. Results confirmed
the influence of the contamination level
related to the dataset. This algorithm
adds significant advances to enable the
use of light and simple machine learning
approaches in real-time applications.
[24,25]
To produce more advanced or
complex forms of interaction
by enabling cobots with
semantic understanding
capabilities or AI-aided
anticipation skills.
Collaborative robots Artificial intelligence.
The overview provides hints of future
cobot developments and identifies future
research frontiers related to economic,
social, and technological dimensions.
[26]
To strike a balance in order to
find a suitable level of
autonomy for human
operators.
Model of Remotely Instructed
Robots (RIRs.)
Modelling method.
Developed model in which the robot is
autonomous in task execution, but also
aids the operator’s ultimate
decision-making process about what to
do next. Presentation of the robot’s own
model of the work scene enables
corrections to be made by the robot, as
well as it can enhance the operator’s
confidence in the robot’s work.
[27,28]
The interaction between humans and robots or mechatronic systems encompasses
many interdisciplinary fields, including physical sciences, social sciences, psychology, arti-
ficial intelligence, computer science, robotics, and engineering. This interaction examines
all possible situations in which a human and a robot can systematically collaborate or
complement each other. Thus, the main goal is to provide robots with various competencies
to facilitate their interaction with humans. To implement such competencies, modelling of
real-life situations and predictions is necessary, applying models in interaction with robots,
and trying to make this interaction as efficient as possible, i.e., inherently intuitive, based
on human experience and artificial intelligence algorithms.
The role of various interfering aspects (Table 2.) in human–robot interaction may lead
to different future perspectives.
Appl. Sci. 2022, 12, 135 8 of 25
Table 2. Interfering aspects in human–robot interaction.
Objective Interaction Approach Solution Ref.
Frustration Close cooperative work Controlled coordination
Sense of control of frustration,
affective computing.
[29]
Emotion recognition
By collecting different
kinds of data.
Discrete models describing
emotions used, facial expression
analysis, camera positioning.
Affective computing.
Empowering robots to observe, interpret
and express emotions. Endow robots with
emotional intelligence.
[30]
Decoding of action
observation
Elucidating the neural
mechanisms of action
observation and
intention understanding.
Decoding the underlying
neural processes.
The dynamic involvement of the mirror
neuron systems (MNS) and the theory of
mind ToM/mentalising network during
action observation.
[31]
Verbal and non-verbal
communication
Interactive communication. Symbol grounding
Composition of grounded semantics, online
negotiation of meaning, affective interaction
and closed-loop affective dialogue, mixed
speech-motor planning, massive acquisition
of data-driven models for human–robot
communication through crowd-sourced
online games, real-time exploitation of
online information and services for
enhanced human–robot communication.
[32]
We can summarise that the growing widespread use of robots and the lack of highly
skilled professionals in the market form clear guidelines for future development in the HMI
area. The main aspirations are an intuitive, human-friendly interface, faster and simpler
programming methods, advanced communication features, and robot reactions to human
movements, mood, and even psychological state. Methods to monitor human actions
and emotions [
33
], fusion of sensors’ data, and machine learning are key technologies for
further improvement in the HMI area.
3.2. Object Recognition
Object recognition is a typical issue in industrial robotics applications, such as sorting,
packaging, grouping, pick and place, and assembling (Table 3). The appropriate recognition
method and equipment selection mainly depends on the given task, object type, and the
number of recognisable parameters. If there are a small number of parameters, simpler
sensing technologies based on typical approaches (geometry measuring, weighing, material
properties’ evaluation) can be implemented. Alternatively, if there are a significant number
of recognisable parameters, photo or video analysis is preferred. Required information
in two- or three-dimensional form from image or video can be extracted using computer
vision techniques such as object localisation and recognition. Various techniques of vision-
based object recognition have been developed, such as appearance-, model-, template-, and
region-based approaches. Most vision recognition methods are based on deep learning [
34
]
and other machine learning methods.
In a previous study [
35
], a lightweight Franka Emika Panda, cobot with seven degrees
of freedom and a Realsense D435 RGB-D camera, mounted on an end effector, was used
to extend the default robots’ function. Instead of using a large dataset-based machine
learning technique, the authors proposed a method to program the robot from a single
demonstration. This robotic system can detect various objects, regardless of their position
and orientation, achieving an average success rate of more than 90% in less than 5 min of
training time, using an Ubuntu 16.04 server running on an Intel(R) Core(TM) i5-2400 CPU
(3.10 GHz) and an NVIDIA Titan X GPU.
Another approach for grasping randomly placed objects was presented in [
36
]. The
authors proposed a set of performance metrics and compared four robotic systems for
bin picking, and took first place in the Amazon Robotics Challenge 2017. The survey
results show that the most promising solutions for such a task are RGB-D sensors and
CNN-based algorithms for object recognition, and a combination of suction-based and
typical two-finger grippers for grasping different objects (vacuum grippers for a stiff object
with large and smooth surface areas, and two-finger grippers for air-permanent items).

Appl. Sci. 2022, 12, 135 9 of 25
Similar localisation and sorting tasks appear in the food and automotive industries,
and in almost every production unit. In [
37
], an experimental method was proposed using
a pneumatic robot arm for separation of objects from a set according to their colour. If the
colour of the workpiece is recognisable, it is selected with the help of a robotic arm. If
the workpiece colour does not meet the requirements, it is rejected. The described sorting
system works according to an image processing algorithm in MATLAB software. More
advanced object recognition methods based on simultaneous colour and height detection
are presented in [38]. A robotic arm with six degrees of freedom (DoF) and a camera with
computer vision software ensure a sorting efficiency of about 99%.
A Five DoF robot arm, “OWI Robotic Arm Edge”, proposed by Pengchang Chen et al.,
was used to validate the practicality and feasibility of a faster region-based convolutional
neural network (faster R-CNN) model using a dataset containing images of symmetric
objects [
39
]. Objects were divided into classes based on colour, and defective and non-
defective objects.
Despite significant progress in existing technologies, randomly placed unpredictable
objects remain a challenge in robotics. The success of a sorting task often depends on the
accuracy with which recognisable parameters can be defined. Yan Yu et al. [
40
] proposed an
RGB-D-based method for solid waste object detection. The waste sorting system consists of a
server, vision sensors, industrial robots, and rotational speedometer. Experiments performed
on solid waste image analysis resulted in a mean average precision value of 49.1%.
Furthermore, Wen Xiao et al. designed an automatic sorting robot that uses height
maps and near-infrared (NIR) hyperspectral images to locate the region of interest (ROI)
of objects, and to perform online statistic pixel-based classification in contours [
41
]. This
automatic sorting robot can automatically sort construction and demolition waste ranging
in size from 0.05 to 0.5 m. The online recognition accuracy of the developed sorting system
reaches almost 100% and ensures operation speed up to 2028 picks/h.
Another challenging issue in object recognition and manipulation is objects having
an undefined shaped and contaminated by dust or smaller particles, such as minerals or
coal. Quite often, such a task requires not only recognising the object but also determining
the position of the centre of mass of the object. Man Li et al. [
42
] proposed an image
processing-based coal and gangue sorting method. Particle analysis of coal and gangue
samples is performed using morphological corrosion and expansion methods to obtain
a complete, clean target sample. The object’s mass centre is obtained using the centre
of the mass method, consisting of particle removal and filling, image binarization, and
separation of overlapping samples, reconstruction, and particle analysis. The presented
method achieved identification accuracy of coal and gangue samples of 88.3% and 90.0%,
and the average object mass centre coordinate errors in the x and y directions were 2.73%
and 2.72%, respectively [42].
Intelligent autonomous robots for picking different kinds of objects were studied as a
possible means to overcome the current limitations of existing robotic solutions for picking
objects in cluttered environments [
43
]. This autonomous robot, which can also be used for
commercial purposes, has an integrated two-finger gripper and a soft robot end effector to
grab objects of various shapes. A special algorithm solves 3D perception problems caused
by messy environments and selects the right grabbing point. When using lines, the time
required depends significantly on the configuration of the objects, and ranges from 0.02 s
when the objects have almost the same depth, to 0.06 s in the worst case when the depth of
the tactile objects is greater than the lowest depth but not perceived [43].
In robotics, the task of object recognition often includes not only recognition and
the determinaton of coordinates, but it also plays an essential role in the creation of a
robot control program. Based on the ABB IRB 140 robot and a digital camera, a low-
cost shapes identification system was developed and implemented, which is particularly
important due to the high variability of welded products [
44
]. The authors developed an
algorithm that recognises the required toolpath from a taken image. The algorithm defines
a path as a complex polynomial. It later approximates it by simpler shapes with a lower

Appl. Sci. 2022, 12, 135 10 of 25
number of coordinates (line, arc, spline) to realise the tool movement using standard robot
programming language features.
Moreover, object recognition can be used for robot machine learning to analyse humans’
behaviour. Such an approach was presented by Hiroaki et al. [
45
], where the authors studied
the behaviour of a human crowd, and formulated a new forecasting task, called crowd
density forecasting, using a fixed surveillance camera. The main goal of this experiment
was to predict how the density of the crowd would change in unseen future frames. To
address this issue, patch-based density forecasting networks (PDFNs) were developed.
PDFNs project a variety of complex dynamics of crowd density throughout the scene, based
on a set of spatially or spatially overlapping patches, thus adapting the receptive fields
of fully convolutional networks. Such a solution could be used to train robotic swarms
because they behave similarly to humans in crowded areas.
Table 3. Research focused on object recognition in robotics.
Objective Technology Approach Improvement Ref.
Extended default “program
from demonstration” feature
of collaborative robots to
adapt them to environments
with moving objects.
Franka Emika Panda cobot
with 7 degrees of freedom,
with a Realsense D435 RGB-D
camera mounted on the
end-effector.
Grasping method to fine-tune
using reinforcement
learning techniques.
The system can grasp various objects from a
demonstration, regardless of their position
and orientation, in less than 5 min of
training time.
[35,46]
Introduction of a set of
metrics for primary
comparison of robotic
systems’ detailed
functionality
and performance.
Robot with different grippers.
Recognition method and the
grasping method.
Developed original robot performance metrics
and tested on four robot systems used in the
Amazon Robotics Challenge competition.
Results of analysis showed the difference
between the systems and promising solutions
for further improvements.
[36,45,47]
To build a low-cost system for
identifying shapes to
program industrial robots for
the 2D welding process.
Robot ABB IRB 140 with a
digital camera, which detects
contours on a 2D surface.
A binarisation and contour
recognition method.
A low-cost system based on an industrial
vision was developed and implemented for
the simple programming of the
movement path.
[48,49]
The patch-based density
forecasting networks (PDFNs)
directly forecast crowd
density maps of future frames
instead of trajectories of each
moving person in the crowd.
Fixed surveillance camera
Density Forecasting in
Image Space.
Density Forecasting in
Latent Space.
PDFNs.
Spatio-Temporal Patch-Based
Gaussian filter.
Proposed patch-based models, PDFN-S and
PDFN-ST, outperformed baselines on all the
datasets. PDFN-ST successfully forecasted
dynamics of individuals, a small group, and a
crowd. The approach cannot always forecast
sudden changes in walking directions,
especially when they happened in the
later frames.
[45]
To separate the objects from a
set according to their colour.
Pneumatic Robot arm
Force in
response to applied pressure.
The proposed robotic arm may be considered
for sorting. Servo motors and image
processing cameras can be used to achieve
higher repeatability and accuracy.
[37,50]
An image processing-based
method for coal and gangue
sorting. Development of a
positioning and
identification system.
Coal and gangue
sorting robot
Threshold segmentation
methods. Clustering method.
Morphological corrosion and
expansion methods. The
centre of mass method.
Efficiency is evaluated using the images of
coal and gangue, which are randomly picked
from the production environment. The
average coordinate errors in the x and y
directions are 2.73% and 2.72%, and the
identification accuracy of coal and gangue
samples is 88.3% and 90.0%, respectively, and
the sum of the time for identification,
positioning, and opening the camera for a
single sample averaged 0.130 s.
[41,51,52]
A computer vision-based
robotic sorter is capable of
simultaneously detecting and
sorting objects by their
colours and heights.
Vision-based process
encompasses identification,
manipulation, selection, and
sorting objects depending on
colour and geometry.
A 5 or 6 DOF robotic arm and
a camera with the computer
vision software detecting
various colours and heights
and geometries.
Computer Vision methods
with the Haar Cascade
algorithm. The Canny edge
detection algorithm is used
for shape identification.
A robotic arm is used for picking and placing
objects based on colour and height. In the
proposed system, colour and height sorting
efficiency is around 99%. Effectiveness, high
accuracy and low cost of computer vision
with a robotic arm in the sorting process
according to color and shape are revealed.
[38,53,54]
A novel multimodal
convolutional neural network
for RGB-D object detection.
A base solid waste sorting
system consisting of a server,
vision sensors, industrial
robot, and
rotational speedometer.
Comparison with single
modal methods.
Washington RGB-D object
recognition
benchmark evaluated.
Meeting the real-time requirements and
ensuring high precision. Achieved 49.1%
mean average precision, processing images in
real-time at 35.3 FPS on one single Nvidia
GTX1080 GPU.
Novel dataset.
[40,55]

Appl. Sci. 2022, 12, 135 11 of 25
Table 3. Cont.
Objective Technology Approach Improvement Ref.
Practicality and feasibility of
a faster R-CNN model using
a dataset containing images
of symmetric objects.
Five DoF robot arm “OWI
Robotic Arm Edge.”
CNN learning algorithm that
processes images with
multiple layers (filters) and
classifies objects in images.
Regional Proposal
Network (RPN)
The accuracy and precision rate are steadily
enhanced. The accuracy rate of detecting
defective and non-defective objects is
successfully improved, increasing the training
dataset to up to 400 images of defective and
non-defective objects.
[39,56,57]
An automatic sorting robot
with height maps and
near-infrared (NIR)
hyperspectral images to
locate objects’ ROI and
conduct online statistic
pixel-based classification in
contours.
24/7 monitoring.
The robotic system with four
modules: (1) the main
conveyor, (2) a detection
module, (3) a light source
module, and (4) a
manipulator.
Mask-RCNN and YOLOv3
algorithms.
Method for an automatic
sorting robot.
Identification include pixel,
sub-pixel,
object-based methods.
The prototype machine can automatically sort
construction and demolition waste with a size
range of 0.05–0.5 m. The sorting efficiency can
reach 2028 picks/h, and the online recognition
accuracy nearly reaches 100%.
Can be applied in technology for
land monitoring.
[41,58,59]
Overcoming current
limitations on the existing
robotic solutions for picking
objects in
cluttered environments.
Intelligent autonomous
robots for picking different
kinds of objects.
Universal jamming gripper.
A comparative study of the
algorithmic performance of
the proposed method.
When a corner is detected, it takes just 0.003 s
to output the target point. With lines, the
required time depends on the object’s
configuration, ranging from 0.02 s, when
objects have almost the same depth, to 0.06 s
in the worst-case scenario.
[43,60–62]
A few main trends can be highlighted from the research analysis related to object
recognition in robotics. These can be defined as object recognition for localisation and
further manipulation; object recognition for shape evaluation and automatic generation of
the robot program code for the corresponding robot movement; and object recognition for
behaviour analysis to use as initial data for machine learning algorithms. A large number
of reliable solutions have been tested in the industrial environment for the first trend, in
contrast to the second and third cases, which are currently being developed.
3.3. Medical Application
The da Vinci Surgical System is the best-known robotic manipulator used in surgery
applications. Florian Richter et al. [
63
] presented a Patient Side Manipulator (PSM) arm
technology to implement reinforcement learning algorithms for the surgical da Vinci
robots. The authors presented the first open-source reinforcement learning environment
for surgical robots, called dVRL [
63
]. This environment allows fast training of da Vinci
robots for autonomous assistance, and collaborative or repetitive tasks, during surgery.
During the experiments, the dVRL control policy was effectively learned, and it was found
that it could be transferred to a realrobot- with minimal efforts. Although the proposed
environment resulted in the simple and primitive actions of reaching and picking, it was
useful for suction and debris removal in a real surgical setting.
Meanwhile, in their work, Yohannes Kassahun et al. reviewed the role of machine
learning techniques in surgery, focusing on surgical robotics [
64
]. They found that currently,
the research community faces many challenges in applying machine learning in surgery
and robotic surgery. The main issues are a lack of high-quality medical and surgical data,
a lack of reliable metrics that adequately reflect learning characteristics, and a lack of a
structured approach to the effective transfer of surgical skills for automated execution [
64
].
Nevertheless, the application of deep learning in robotics is a very widely studied field.
The article by Harry A. Pierson et al. in 2017 provides a recent review emphasising the
benefits and challenges vis-à-vis robotics [
65
]. Similarly to [
64
], they found that the main
limitations preventing deep learning in medical robotics are the huge volume of training
data required and a relatively long training time.
Surgery is not the only field in medicine in which robotic manipulators can be used.
Another autonomous robotic grasping system, described by John E. Downey et al., intro-
duces shared control of a robotic arm based on the interaction of a brain–machine interface
(BMI) and a vision guiding system [
66
]. A BMI is used to define a user’s intent to grasp or
transfer an object. Visual guidance is used for low-level control tasks, short-range move-
ments, definition of the optimal grasping position, alignment of the robot end-effector,
Appl. Sci. 2022, 12, 135 12 of 25
and grasping. Experiments proved that shared control movements were more accurate,
efficient, and less complicated than transfer tasks using BMI alone.
Another case that requires fast robot programming methods and is implemented
in medicine is the assessment of functional abilities in functional capacity evaluations
(FCEs) [
67
]. Currently, there is no single rational solution that simulates all or many of
the standard work tasks that can be used to improve the assessment and rehabilitation of
injured workers. Therefore, the authors proposed that, with the use of the robotic system
and machine learning algorithms, it is possible to simulate workplace tasks. Such a system
can improve the assessment of functional abilities in FCEs and functional rehabilitation
by performing reaching manoeuvres or more complex tasks learned from an experienced
therapist. Although this type of research is still in its infancy, robotics with integrated
machine learning algorithms can improve the assessment of functional abilities [67].
Although the main task of robotic manipulators is the direct manipulation of objects
or tools in medicine, these manipulators can also be used for therapeutic purposes for
people with mental or physical disorders. Such applications are often limited by the ability
to automatically perceive and respond as needed to maintain an engaging interaction.
Ognjen Rudovic et al. presented a personalised deep learning framework that can adapt
robot perception [
68
]. The researchers in the experiment focused on robot perception, for
which they developed an individualised deep learning system that could automatically
assess a patient’s emotional states and level of engagement. This makes it easier to monitor
treatment progress and optimise the interaction between the patient and the robot.
Robotic technologies can also be applied in dentistry. To date, there has been a lack
of implementation of fundamental ideas. In a comprehensive review of robotics and the
application of artificial intelligence, Jasmin Grischke et al. present numerous approaches to
apply these technologies [
69
]. Robotic technologies in dentistry can be used for maxillofacial
surgery [
70
], tooth preparation [
71
], testing of toothbrushes [
72
], root canal treatment and
plaque removal [
73
], orthodontics and jaw movement [
74
], tooth arrangement for full
dentures [75], X-ray imaging radiography [76], swab sampling [77], etc.
A summary of research focused on robotics in medical applications is provided in
Table 4. It can be seen that robots are still not very popular in this area, and technological
and phycological/ethical factors can explain this. From the technical point of view, more
active implementation is limited by the lack of fast and reliable robot program preparation
methods. Regarding psychological and ethical factors, robots are still unreliable for a large
portion of society. Therefore, they are only accepted with significant hesitation.
Table 4. Robotic solutions in medical applications.
Objective Technology Approach Improvement Ref.
Create bridge between
reinforcement learning and
the surgical robotics
communities by presenting
the first open-sourced
reinforcement learning
environments for surgical da
Vinci robots.
Patient Side Manipulator
(PSM) arm.
Da VinciR©Surgical Robot.
Large Needle Driver (LND),
with a jaw gripper to grab
objects such as suturing
needle.
Reinforced learning,
OpenAI Gym
DDPG (Deep Deterministic Policy
Gradients) and HER (Hindsight
Experience Replay)
V-REP physics simulator
Developed new reinforced learning
environment for fast and effective
training of surgical da Vinci robots for
autonomous operations.
[63]
A method of shared control
where the user controls a
prosthetic arm using a
brain–machine interface and
receives assistance with
positioning the hand when it
approaches an object.
Brain–machine interface
system.
Robotic arm.
RGB-D camera mounted
above the arm base.
Shared control system.
An autonomous robotic grasping
system
Shared control system for a robotic
manipulator, making control more
accurate, more efficient, and less
difficult than an alone control system.
[66]
A personalised deep learning
framework can adapt robot
perception of children’s
affective states and
engagement to different
cultures and individuals.
Unobtrusive audiovisual
sensors and wearable sensors,
providing the child’s
heart-rate, skin-conductance
(EDA), body temperature,
and accelerometer data.
Feed-forward multilayer neural
networks.
GPA-net
Achieved an average agreement of
~60% with human experts to estimate
effect and engagement.
[68]

Appl. Sci. 2022, 12, 135 13 of 25
Table 4. Cont.
Objective Technology Approach Improvement Ref.
An overview of existing
applications and concepts of
robotic systems and artificial
intelligence in dentistry, for
functional capacity
evaluations, of the role of ML
in surgery using surgical
robotics, of deep learning
vis-à-vis physical robotic
systems, focused on
contemporary research.
An overview An overview An overview [64,65,67,69]
Transoral robot towards
COVID-19 swab sampling.
Flexible manipulator, an
endoscope with a monitor, a
master device.
Teleoperated configuration for swab
sampling
A flexible transoral robot with a
teleoperated configuration is proposed
to address the surgeons’ risks during
the face-to-face COVID-19 swab
sampling.
[77]
3.4. Path Planning, Path Optimisation
The process known as robotic navigation aims to achieve accurate positioning and
avoiding obstacles in the pathway. It is essential to satisfy constraints such as limited
operating space, distance, energy, and time [
78
]. The path trajectory formation process
consists of these four separate modules: perception, when the robot receives the necessary
information from the sensors; localisation, when the robot aims to control its position in the
environment; path planning; and motion control [
79
]. The development of autonomous
robot path planning and path optimisation algorithms is one of the most challenging
current research areas. Nevertheless, any kind of path planning requires information
about the initial robot position. In the stationary robot’s case, such information is usually
easily accessible, contrary to industrial manipulators mounted on mobile platforms. In
mobile robots and automatically guided vehicles (AGV), accurate self-localisation in various
environments [80,81] is a basis for further trajectory planning and optimisation.
According to the amount of available information, robot path planning can be cate-
gorised into two categories, namely, local and global path planning. Through a local path
planning strategy, the robot has rather limited knowledge of the navigation environment.
The robot has in-depth knowledge of the navigation environment when planning the
global path to reach its destination by following a predetermined path. The robotic path
planning method has been applied in many fields, such as reconstructive surgery, ocean
and space exploration, and vehicle control. In the case of pure industrial robots, path
planning refers to finding the best trajectory to transfer a tool or object to the destination
in the robot workspace. It is essential to note that typical industrial robots are not feasible
for real-time path planning. Usually, trajectories are prepared in advance using online or
offline programming methods. One of the possible techniques is the implementation of
specialised commercial computer-aided manufacturing (CAM) software such as Master-
cam/Robotmaster or Sprutcam. However, the functionality of such software is relatively
constrained and does not go beyond the framework of classical tasks, such as welding or
milling. The use of CAM software also requires highly qualified professionals. As a result,
the application of this software to individual installations is economically disadvantageous.
As an alternative to CAM software, methods based on the copying movements of highly
skilled specialists using commercially available equipment, such as MIMIC from Nordbo
Robotics (Antvorskov, Denmark), may be used. This platform allows using demonstrations
to teach robots smooth, complex paths by recording required movements that are smoothed
and optimised. To overcome the limitations caused by the lack of real-time path planning
features in robot controllers, additional external controllers and real-time communication
with the manipulator is required. In the area of path planning and optimisation, experi-
ments have been conducted for automatic object and 3D position detection [
82
] quasi-static
path optimisation [
83
], image analysis [
84
], path smoothing [
85
], BIM [
86
], and accurate
Appl. Sci. 2022, 12, 135 14 of 25
self-localisation in harsh industrial environments [
80
,
81
]. More information about methods
and approaches proposed by researchers is listed in Table 5.
Table 5. Research focused on path planning and optimisation.
Objective Technology Approach Improvement Ref.
The position of the
objects—possible trajectory to
an object in real-time.
A robotic system consisting of
an ABB IRB120 robot
equipped with a gripper and
a 3D Kinect sensor.
Detection of the workpieces.
Object recognition techniques
are applied using available
algorithms in MATLAB’s
Computer Vision and Image
Acquisition Toolbox.
The algorithm for finding 3D object position
according to colour segmentation in real-time.
The main focus was on finding the depth of an
object from the Kinect sensor. Kinect could
distinguish colour correctly, and the robot could
accurately navigate to the detected object.
[82]
The combination of
eye-tracking and computer
vision automate the approach
of a robot to its targeted point
by acquiring its 3D location.
Eye-tracking device,
webcam.
Image analysis and
geometrical reconstruction.
The computed coordinates of the target 3D
localisation have an average error of 5.5 cm,
which is 92% more accurate than eye-tracking
only for the point of gaze calculation, with an
estimated error of 72 cm.
[87]
Computer vision technology
for real-time seam tracking in
robotic gas tungsten arc
welding (GTAW).
Welding robot GTAW—the
robot arm, the robot
controller, the vision system,
isolation unit, the weld power
supply, and the host
computer.
Passive vision system.
Passive vision system
image processing.
The developed method is feasible and sufficient
to meet the specific precision requirements of
some applications in robotic seam tracking.
[88]
A higher fidelity model for
predicting the entire
pose-dependent FRF of an
industrial robot by combining
the advantages of
Experimental Modal Analysis
(EMA) with Operational
Modal Analysis for milling
processes.
KUKA KR500-3 6 DOF
industrial robot
Hybrid statistical modelling:
Frequency Response Function
(FRF) modelling method.
A Bayesian inference and hyperparameter
updating approach for updating the
EMA-calibrated GPR models of the robot FRF
with OMA-based FRF data improved the
model’s compliance RMSE by 26% and 27% in
the x and y direction tool paths, respectively,
compared to only EMA-based calibration. The
methodology reduced the average number of
iterations and calibration times required to
determine the optimal GPR model
hyperparameters by 50.3% and 31.3%,
respectively.
[84]
Safe trajectories without
neglecting cognitive
ergonomics and production
efficiency aspects.
UR3 lightweight robot Experimental tasks
The task’s execution time was reduced by 13.1%
regarding the robot’s default planner and 19.6%
concerning the minimum jerk smooth
collaboration planner.
This new approach is highly relevant for
manufacturers of collaborative robots (e.g., for
integration as a path option in the robot pendant
software) and for users (e.g., an online service
for calculating the optimal path and subsequent
transfer to the robot).
[89]
An industrial robot moving
between stud welding
operations in a stud welding
station.
Industrial robot
Quasi-static path
optimisation for an industrial
robot
The method was successfully applied to a stud
welding station for an industrial robot moving
between two stud welding operations. Even for
a difficult case, the optimised path reduced the
internal force in the dress pack. It kept the
dressed robot from the surrounding geometry
with a prescribed safety clearance during the
entire robot motion.
[83]
An industrial assembly task
for learning and optimisation,
considering uncertainties.
A Franka EMIKA Panda
manipulator
Task trajectory learning
approach.
Task optimisation approach.
The proposed approach made the robot learn the
task execution and compensate for the task
uncertainties. The HMM + BO methodology and
the HMM algorithm without optimisation were
compared. This comparison shows the
capabilities of the optimisation stage to
compensate for task uncertainties. In particular,
the HMM + BO methodology shows an
assembly task success rate of 93%, while the
HMM algorithm shows a success rate of only
19%.
[90]
The postprocessing and path
optimisation based on the
non-linear errors to improve
the accuracy of multi-joint
industrial robot-based 3D
printing.
Multi-joint industrial robot
for 3D printing
Path smoothing method
Multi-joint industrial robot-based 3D printing
can be used for the high-precision printing of
complex freeform surfaces. An industrial robot
with only three joints is used, and the solutions
of joint angles for the tool orientations are not
proposed, which is essential for printing the
freeform surface.
[91]

Appl. Sci. 2022, 12, 135 15 of 25
Table 5. Cont.
Objective Technology Approach Improvement Ref.
A comparative study of robot
pose optimisation using static
and dynamic stiffness models
for different cutting scenarios.
KUKA KR 500–3 industrial
robot,
aluminium 6061
Complete pose (CP) and the
decoupled partial pose (DPP)
methods.
Effect of optimisation method
on machining accuracy
A dynamic model-based robot pose optimisation
yields significant improvement over a static
model-based optimisation for cutting conditions
where the time-varying cutting forces approach
the robot’s natural frequencies. A static
model-based optimisation is sufficient when the
frequency content of the cutting forces is not
close to the robot’s natural frequencies.
[92]
The feasibility and validity of
proposed stiffness
identification and
configuration optimisation
methods.
KUKA KR500 industrial robot
Robot stiffness characteristics
and optimisation methods.
Point selection method
The smooth processing strategy improves
optimisation efficiency, ensuring minimal
stiffness loss. According to the machining
results of a cylinder head of a vehicle engine, the
milling quality was improved obviously after
the configuration optimisation, and the validity
of these methods are verified.
[85]
Real-time compensation
setups.
A standard KUKA
KR120R2500 PRO industrial
robot with a spindle
end-effector
Real-time Closed Loop
Compensation method
Real-time metrology feedback cannot fully
compensate for the sudden error spikes caused
by the backlash. The mitigation strategy of
automatically reducing feed rate (ASC) was
demonstrated to reduce backlash error
significantly. However, ASC considerably
increases the cycle time for a toolpath that
involves many direction reversals and leads to
uneven cutter chip load and variation in surface
finish. Backlash, therefore, remains the largest
source of residual error for a robot under
real-time metrology compensation.
[93]
Building Information Model
(BIM)-based robotic assembly
model that contains all the
required information for
planning.
ABB IRB6700-235 robot (6
DOF), a construction plane
(approximately 1.5 m × 0.9
m), a scene modelling camera
(Sony a5100), and a modelling
computer (Dell Precise).
Image-based 3D modelling
method.
Experimental method
A general IFC model for robotic assembly
contains all the information needed for
task-level planning; BIM and image-based
modelling are used to calibrate robot pose for
the unification of the robot coordinate system,
construction area, and assembly task; a simple
conversion process is presented to convert the
3D placement point coordinates of each brick
into the robotic control instructions.
In the process of experimental verification,
task-level planning can maintain the same
accuracy as that of the traditional method but
saves time when facing more complex tasks.
[86]
A model of reversibly
controlled industrial robots
based on abstract semantics.
Robotic assembly
Error recovery using reverse
execution
A programming model which enables robot
assembly programs to be executed in reverse.
Temporarily switching the direction of program
execution can be an efficient error recovery
mechanism. Additional benefits arise from
supporting reversibility in robotic assembly
language, namely, increased code reuse and
automatically derived disassembly sequences.
[94]
The control strategies for
robotic PiH assemblies and
the limitations of the current
robotic assembly
technologies.
Robotic PiH assembly
Typical peg-in-hole (PiH)
assembly methods
The system outperforms the operator
performing the same task with magnified visual
feedback regarding both completion time and
the number of successful insertions.
The proposed strategies can correctly diagnose
the assembly process’s position errors and
effectively realise error recovery.
[95]
An overview of computer
vision for preoperative,
intraoperative, and
postoperative surgical stages
to assist with planning, tool
detection, identification, pose
tracking, and augmented
reality, for surgical skill
assessment and retrospective
analysis of the procedure.
An overview An overview An overview [96]
3.5. Food Industry
As the world’s population grows, the demand for food also continues to grow. Food
suppliers are under pressure to work more efficiently, and consumers want more convenient
and sustainable food. Robotics and automation are a key part of the solution to this
goal. The food production sector has been relatively slowly robotised compared to other
industries [
97
]. Robotics is applied in food manufacture, packaging, delivery, and cookery

Appl. Sci. 2022, 12, 135 16 of 25
(cake decoration) [
98
]. Although the food industry is ranked fourth in terms of the most-
automated sectors, robotic devices capable of processing nutrients of different shapes and
materials are in high demand. In addition, these devices help to avoid consequences
such as food-borne illness caused directly by the contamination of nutrients by nutrient
handlers [
99
]. For this purpose, a dual-mode soft gripper was developed that can grasp
and suck various objects having a weight of up to 1 kg. Soft grippers prevent damage to
food [100].
Artificial intelligence-enabled robotic applications are entering the restaurant industry
in the food processing and guest service operations. In a review assessing the potential
for process innovation in the restaurant sector, an information process for the use of
new technologies for process innovation was developed [
101
]. However, the past year,
particularly due to the circumstances of COVID-19, has been a breakthrough year in
robotisation in the food industry. A more detailed overview of researches focused on
robotising the food industry is provided in Table 6.
Table 6. Research focused on the food industry.
Objective Technology Approach Improvement Ref.
The applications of industrial
robots in the food industry
and their automation
prospects. A 4-step Food
Industrial Robot
Methodology for selecting
industrial robots for food
processing operations.
Articulated robot,
parallel robot,
Cartesian robot
The four steps within the
Food Industrial Robot
Methodology (FIRM).
The FIRM presented in this paper outlined the
ability to classify industrial robot capabilities
and match them to specific characteristics of
foodstuffs and requirements for their processing
based on four steps that navigate eight tasks.
This work also identified many factors that
should lay the groundwork for future research
in the application of industrial robots within
food manufacturing.
[102]
Identification, analysis, and
understanding robotics in one
of the largest sectors, the food
chain.
Robots in the food chain Case study of a Delivery Bot
The emergence of robotics in business is widely
seen across the world. However, the trust in
human–robotic interaction appears to be
underdeveloped. Reducing the number of
repetitive jobs by replacing them with robots is
not replacing jobs but paving the way for more
intelligent jobs.
[98]
Maximise performance by
utilising fewer resources
Dual model soft gripper for
food packaging
Grasp and suck process for
various types of objects
having a weight up to 1 kg
The proposed dual-mode gripper can perform
grasp and suck functions for multiple types of
nutrients. Additional improvements may be
automatic switching of the gripper finger
configuration and distance adjustment.
[100]
Challenges in the application
of industrial robots in the
food industry
An overview An overview An overview [97]
Path planning optimisation
technique in the food
industry
The proposed optimisation
technique is based on the use
of an off-axis tool
EPSON T6 SCARA robot
This path optimisation technique shortens the
cycle time and reduces energy consumption.
[103]
3.6. Agricultural Applications
Agricultural robots are a specialised type of technology capable of assisting farmers
with a wide range of operations. Their primary role is to tackle labour intensive, repetitive,
and physically demanding tasks. Robots are used in planting, seedling identification, and
sorting. Autonomous tractors perform the function of weeding and harvesting. Drones
and autonomous ground vehicles are used for crop monitoring and condition assessment.
In animal husbandry, robots are used for feeding cattle, milking, collecting and sorting
eggs, and autonomous cleaning of pens. Cobots are also used in agriculture. These robots
possess mechanical arms and make harvesting much easier for farmers. The agriculture
robot market size is expected to reach USD 16,640.4 billion by 2026; however, specific robots,
rather than industrial robots, will occupy the majority of the market. A detailed overview of
research focused on implementing industrial robots in agricultural applications is provided
in Table 7.

Appl. Sci. 2022, 12, 135 17 of 25
Table 7. Research focused on agricultural applications.
Objective Technology Approach Improvement Ref.
The potential applications in
agriculture by presenting a
variety of manipulators and
various forms of sensors.
Parallel grippers, angular
grippers, and biologically
inspired grippers
manufactured by Festo.
Various sensors
Application methods.
State-of-the-art robotic grippers, grasping and
control strategies, and their applications in
agricultural robots. Applications of robotic
grippers in food, agricultural, and bio-system
engineering were summarised in detail.
[104]
A scheme that combines
computer vision and
multi-tasking processes to
develop a small-scale smart
agricultural machine that can
automatically weed and
perform variable rate
irrigation within a cultivated
field.
The frames of the machine,
the weeding and watering
mechanism, the image and
soil moisture sensor, the
actuator, and the graphical
user interface (GUI)
Image processing methods
such as HSV (hue (H),
saturation (S), value (V))
colour conversion, estimation
of thresholds during the
image binary segmentation
process, and morphology
operator procedures.
Fuzzy logic,
multi-tasking processes
The system can classify plants and weeds in real
time with an average classification rate of 90% or
higher. This allows the machine to perform
weeding and watering while maintaining the
moisture content of the deep soil at 80 ± 10%
and an average weeding rate of 90%.
[105]
A systematic overview
aiming to identify the
applicability of computer
vision in precision agriculture
to produce the five
most-produced grains in the
world: maise, rice, wheat,
soybean, and barley. Different
approaches to treat disease
detection, grain quality, and
phenotyping.
An overview An overview An overview [106]
3.7. Civil Engineering Industry
In general, the construction industry is relatively inefficient from the perspective
of automation. Robotics are seldom applied [
107
]. The main identified challenges for
higher adoption of robotics in the construction industry were grouped into four categories:
contractor-side economic factors; client-side economic factors; technical and work-culture
factors; and weak business case factors. Technical and work-culture factors include an
untrained workforce; unproven effectiveness and immature technology; and the current
work culture and aversion to change [108].
The perspective of robotics in civil engineering is significantly better. Here, robotics
provides considerable opportunities to increase productivity, efficiency, and flexibility,
from automated modular house production to robotic welding, material handling on
construction sites, and 3D printing of houses or certain structures. Robots make the industry
safer and more economical, increase sustainability, and reduce its environmental impact,
while improving quality and reducing waste. The total global value of the construction
industry is forecast to grow by 85% to USD 15.5 trillion by 2030 [
109
]. Robots can make
construction safer by handling large and heavy loads, working in hazardous locations,
and enabling new, safer construction methods. Transferring repetitive and dangerous
tasks that humans are increasingly reluctant to perform to robots means that automation
can help address the labour and skills crisis, and make the construction industry more
attractive [
110
,
111
]. Few classic robots are used in the construction process due to the
dynamic and inaccurately described environment; however, work on 3D buildings and their
environmental models reduces this limitation. A detailed overview of related references is
provided in Table 8.

Appl. Sci. 2022, 12, 135 18 of 25
Table 8.
Research focused on implementing robots in the construction and civil engineering industry.
Objective Technology Approach Improvement Ref.
A novel fabrication process
for the assembly of full-scale
masonry vaults without
falsework.
Two industrial robotic arms
(ABB 4600 2.55). The
prototype of the robotically
assembled brick vault.
The fabrication method is
based on a cooperative
assembly approach in which
two robots alternate between
placement and support first
to build a stable central arch.
Cooperative robotic assembly methods can be
applied to constructing a spanning structure
built without a temporary falsework. Where
traditional manufacturing techniques require
geometric guides, this project shows how it can
instead leverage the robots’ precision to
accurately place bricks in bespoke orientations.
[112]
A computer vision for
real-time extrusion quality
monitoring during robotic
building construction.
Laboratory-scale concrete
printer.
Logitech 720p camera to
capture extrusion videos. The
extrusion videos are
processed in real-time by a
Raspberry Pi 3B.
OpenCV library, adopted,
shape-based approach.
Gaussian filter.
The developed system can print up to ten 120
cm long concrete layers. It uses an extrusion
mechanism similar to the Contour Crafting
machine to print layers having a height of 3.81
cm and a width of 2.54 cm, from concrete and
mortar at different linear speeds (up to 10 cm/s)
and deposition rates.
The vision system detected all designed
variation levels (±5 to ±15 L/m
3
change in the
water in the mixture).
In terms of accuracy and responsiveness to
material variations, the obtained experimental
results imply the excellent potential for using
computer vision for automated quality
monitoring of construction-scale 3D printing.
[113]
Presents the possibilities of
applying lightweight cobots
to individual tasks in the
construction sector.
Presenting of light robotics
together with 3D printing
technology provides the rapid
advantage of prototyping to
test ideas and applications.
The simplest visual system
was used to follow a
simplified approach, which
can be controlled directly by a
robot controller.
Future research on increasing the dynamics of
torsional tasks using a mobile robot with a
scissor lift could result in the cobot and mobile
platform covering the entire construction area.
[114]
To determine if improved
robotic technologies have also
been used in the building
industry.
An overview An overview An overview [115]
To determine how robotic
automation can help in the
construction industry.
A common framework for
current technological
innovation in this field and a
development plan were
outlined.
The projected impacts on
traditional processes,
construction sites, emerging
technologies, and related
professions are summarised
to identify future implications
and future directions toward
self-sufficiency.
Artificial intelligence must be a successful factor
in the involvement of robotic devices in the
construction industry.
[110]
Provide a systematic
overview of human-robot
interactions concerning
various types of robots
Human–robot interaction,
human–robot cooperation
(HRC).
An overview
Further investigation of multi-function robots,
human–robot interaction in robotic fabrication,
and multipurpose robots.
[116]
The main goal is to fully
describe feedback based on
sensor informed programs for
process monitoring and
fabrication data collection
and analysis.
Additive manufacturing. An overview
Effective robotic production still requires the
communication and management of
progressively improving materials and building
systems.
[117]
Application of a Building
Information Modelling (BIM)
method for efficient and
simple deployment of robot
systems for building
construction and operation
BIM integrative, collaborative
robotics.
The robot is provided with a
priori geometric and semantic
information about the
environment with the help of
the BIM system.
Future improvements consist of the assessment
of the actual applicability of the system on the
construction site and closing the gap between
robotic systems and the construction site.
[111]
4. Discussion
Implementing an industrial robot in practice is a complex procedure that requires
answering many questions about the possibilities of using the robot and the process itself.
The situation varies slightly depending on the industry area. Robots have been used in
some areas for 30 or more years, whereas, in other areas, the implementation of robots is
only beginning. In industrial sectors with a long tradition of robotics, new solutions are
relatively more straightforward. These solutions are typically limited to implementing
new tools, control algorithms, and robotic action quality control systems. Therefore, our
article focuses on areas where traditions of implementing robots do not exist yet, and such
solutions are just beginning to be implemented.
Despite the different application areas, some achievements in robotics can be success-
fully transferred from one industry to another. Furthermore, bypassing limitations in one
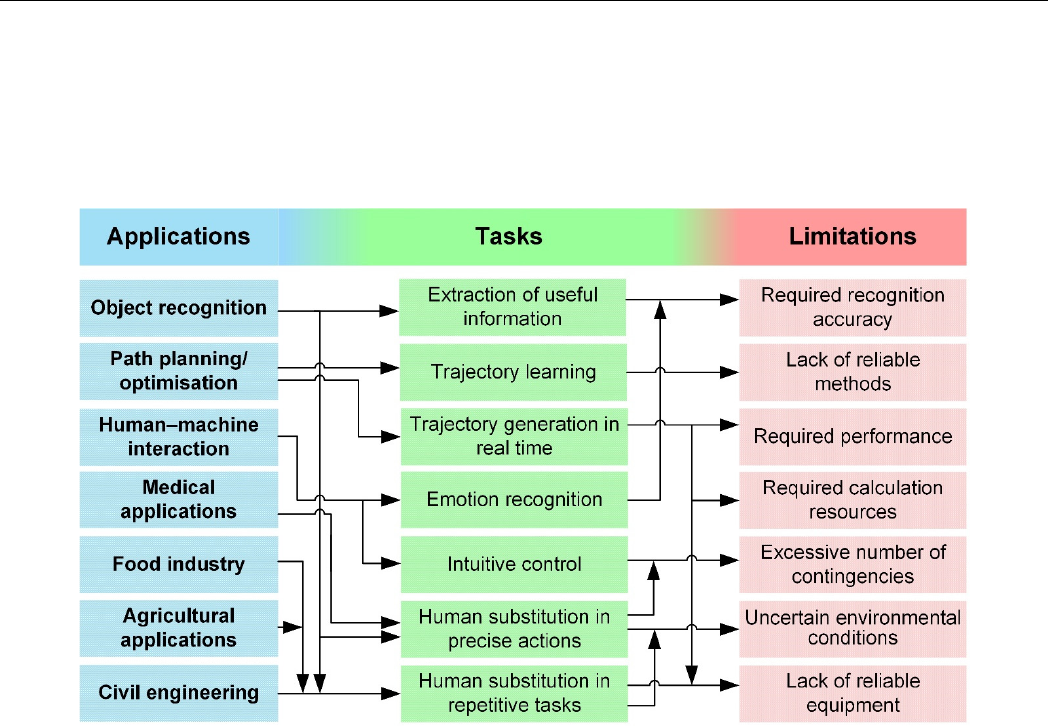
Appl. Sci. 2022, 12, 135 19 of 25
area often ensures advances in robotics in other sectors. For example, the implementation
of computer vision to localise and manipulate randomly placed mechanical parts on a
conveyor fostered the robotisation of sorting processes in all industry fields.
This article provided an overview of the main areas where robots are beginning to be
implemented, and identified the main challenges and limitations they face (Figure 4).
Appl. Sci. 2022, 11, x FOR PEER REVIEW 20 of 26
Figure 4. Relations between robot implementation areas, typical tasks and limitations.
The conclusion is that tasks performed by the robots and actual limitations are closely
related to each other regardless of the implementation field. In this paper, the tasks for
which robots are most preferred rather than humans were identified. Typically, these
tasks are repetitive and extremely precise operations that require evaluating a considera-
ble amount of data. For example, the implementation of robots for object recognition has
three main functions in which robots replace humans: (1) extraction of useful information
from massive data flow; (2) accurate movements to manipulate with an object or tool; and
(3) repetitive action (sorting). In addition, the food, agriculture, and civil engineering in-
dustries aim to replace humans involved in repetitive actions. In contrast, medical appli-
cations are mainly related to accurate manipulation and hazardous environments.
Preparation of robots for an operation, particularly in dynamic, varying situations, is
a time- and resource-consuming activity. Therefore, a large amount of research focuses on
enhancing human–robot interaction and path planning/optimisation issues. The goal is to
develop faster and more comfortable methods to operate robots in real time, and to create
a possibility for the robot to react to the operator’s emotional state.
Many different factors limit the implementation of industrial robots in typical tasks.
The seven main limitations in the reviewed application fields were identified. In sum-
mary, the main limitations are the lack of suitable methods, high recognition accuracy,
and performance requirements; varying environmental conditions; an excessive number
of possible situations; and lack of reliable equipment (tools). Notably, these limitations are
unrelated to the robot’s mechanical systems (except the tools). Therefore, most modern
robotic solutions are fostered by the development of additional equipment or control al-
gorithms. Computer vision, sensor fusion, and machine learning are becoming major en-
gines driving industrial robots’ wider application. They increase robots’ flexibility and
enable them to make smart adaptive solutions, although robots were initially designed
only to perform repetitive actions.
As a result of the development of robot control systems, robots’ internal structures
have also been improved. These improvements typically include the implementation of
new mathematical methods for robot control or optimisation of energy consumption
[118]. For example, a previous study [119] provided a methodology that allows imple-
mentation of a non-typical Denavit–Hartenberg method for a delta robot.
Figure 4. Relations between robot implementation areas, typical tasks and limitations.
The conclusion is that tasks performed by the robots and actual limitations are closely
related to each other regardless of the implementation field. In this paper, the tasks for
which robots are most preferred rather than humans were identified. Typically, these
tasks are repetitive and extremely precise operations that require evaluating a considerable
amount of data. For example, the implementation of robots for object recognition has
three main functions in which robots replace humans: (1) extraction of useful information
from massive data flow; (2) accurate movements to manipulate with an object or tool;
and (3) repetitive action (sorting). In addition, the food, agriculture, and civil engineering
industries aim to replace humans involved in repetitive actions. In contrast, medical
applications are mainly related to accurate manipulation and hazardous environments.
Preparation of robots for an operation, particularly in dynamic, varying situations, is
a time- and resource-consuming activity. Therefore, a large amount of research focuses on
enhancing human–robot interaction and path planning/optimisation issues. The goal is to
develop faster and more comfortable methods to operate robots in real time, and to create a
possibility for the robot to react to the operator’s emotional state.
Many different factors limit the implementation of industrial robots in typical tasks.
The seven main limitations in the reviewed application fields were identified. In summary,
the main limitations are the lack of suitable methods, high recognition accuracy, and
performance requirements; varying environmental conditions; an excessive number of
possible situations; and lack of reliable equipment (tools). Notably, these limitations are
unrelated to the robot’s mechanical systems (except the tools). Therefore, most modern
robotic solutions are fostered by the development of additional equipment or control
algorithms. Computer vision, sensor fusion, and machine learning are becoming major
engines driving industrial robots’ wider application. They increase robots’ flexibility and

Appl. Sci. 2022, 12, 135 20 of 25
enable them to make smart adaptive solutions, although robots were initially designed
only to perform repetitive actions.
As a result of the development of robot control systems, robots’ internal structures
have also been improved. These improvements typically include the implementation of
new mathematical methods for robot control or optimisation of energy consumption [
118
].
For example, a previous study [
119
] provided a methodology that allows implementation
of a non-typical Denavit–Hartenberg method for a delta robot.
Nonetheless, despite the recent improvements and smart solutions realised in indus-
trial robots, their widespread use in non-typical areas remains limited. The main limitations
and guidelines for further research are new intuitive control methods, user-friendly inter-
faces, specialised software, and real-time control methods.
5. Conclusions
Analysis of robot applications revealed a number of important issues, and showed
that the current rare applications of robot implementations are not always limited by
technical difficulties.
Some application fields have no tradition in such activities, such as the civil engi-
neering, food, and agriculture industries. Human–robot cooperation in classical industrial
robots and in specialised cobot cases still demands an intensive introduction into these
industries. However, in this case, the introduction involves non-technical aspects such
as human psychology and personal acceptance of the robots in their working place. An-
other aspect of the subjective attitude to robots is limited by their acceptance by managers
and process designers; however, they are also lacking implementation experience and
knowledge of cutting-edge achievements in robotic applications.
Many automation cases are still limited by artificial intelligence (AI) issues related to
object recognition, object position recognition, and decision generation for object grabbing
and manipulating. This issue arises from the process of widening robotic implementation
in existing industries, and therefore many technologies should be redesigned. Nevertheless,
pressure due to the absence of a skilled labour force has led to new solutions. Many general
solutions using machine vision and sensor fusion (camera–lidar scanner, camera–distance
sensors, etc.) have been spontaneously implemented in numerous industrial enterprises.
These approaches are starting to appear in home appliances, but market penetration of
these solutions remains low.
Robot implementations are often subject to systematic difficulties, such as manipula-
tion and orientation of solid objects with non-stable geometrical shapes. These objects are
widely used in industry and home appliances, and include textiles, clothes, and cables. At
present, this area has few publications and technical solutions, and is in the research stage;
presentations of some of the publicly available cases are at the level of scientific publications.
Although clamps and templates are currently used for specific industrial cases, general
solutions have not yet been achieved. This situation requires rethinking processes and
possibly preparing objects for robotic processing, rather than using tremendous computing
and multiplying hardware.
The result of this review points to four evident directions in the field of robotics:
•
development of intelligent companion equipment for robots (sensors, grippers, and
servo-applications);
• AI-based solutions for signal processing and decision making;
• the redesign of general objects and the related features for robotic applications;
•
provision of psychological solutions for robot–human collaboration and acceptance of
robots in the workplace.

Appl. Sci. 2022, 12, 135 21 of 25
Author Contributions:
Conceptualisation, V.B. and A.D.; methodology, U.S.-B.; formal analysis,
U.S.-B. and E.Š.; investigation, J.S.-Ž.; resources, V.B.; writing—original draft preparation, U.S.-B.
and J.S.-Ž.; writing—review and editing, V.B. and A.D.; visualisation, A.D.; supervision, V.B.; project
administration, J.S.-Ž.; funding acquisition, V.B. All authors have read and agreed to the published
version of the manuscript.
Funding:
This work is part of the AI4DI project, receiving funding from the Electronic Components
and Systems for European Leadership Joint Undertaking in collaboration with the European Union’s
H2020 Framework Programme (H2020/2014-2020) and National Authorities, under grant agreement
No 826060.
Institutional Review Board Statement: Not applicable.
Informed Consent Statement: Not applicable.
Data Availability Statement:
The data presented in this study are available on request from the
corresponding author. The data are not publicly available due to the project consortium agreement.
Conflicts of Interest: The authors declare no conflict of interest.
References
1.
ISO—ISO 8373:2012—Robots and Robotic Devices—Vocabulary. Available online: https://www.iso.org/standard/55890.html
(accessed on 7 April 2021).
2.
IFR Presents World Robotics Report 2020—International Federation of Robotics. Available online: https://ifr.org/ifr-press-
releases/news/record-2.7-million-robots-work-in-factories-around-the-globe (accessed on 7 April 2021).
3.
ScienceDirect Search Results—Keywords (Industrial Robot). Available online: https://www.sciencedirect.com/search?qs=
Industrial%20robot (accessed on 7 April 2021).
4. Dekle, R. Robots and industrial labor: Evidence from Japan. J. Jpn. Int. Econ. 2020, 58, 101108. [CrossRef]
5.
Olivares-Alarcos, A.; Foix, S.; Alenyà, G. On inferring intentions in shared tasks for industrial collaborative robots. Electronics
2019, 8, 1306. [CrossRef]
6.
Smith, R.; Cucco, E.; Fairbairn, C. Robotic Development for the Nuclear Environment: Challenges and Strategy. Robotics
2020
, 9, 94.
[CrossRef]
7.
Rojas, R.A.; Wehrle, E.; Vidoni, R. A Multicriteria Motion Planning Approach for Combining Smoothness and Speed in Collabora-
tive Assembly Systems. Appl. Sci. 2020, 10, 5086. [CrossRef]
8.
Ivanov, S.; Seyito˘glu, F.; Markova, M. Hotel managers’ perceptions towards the use of robots: A mixed-methods approach. Inf.
Technol. Tour. 2020, 22, 505–535. [CrossRef]
9.
Colim, A.; Sousa, N.; Carneiro, P.; Costa, N.; Arezes, P.; Cardoso, A. Ergonomic intervention on a packing workstation with
robotic aid-case study at a furniture manufacturing industry. Work 2020, 66, 229–237. [CrossRef] [PubMed]
10.
Giusti, A.; Guzzi, J.; Ciresan, D.C.; He, F.L.; Rodriguez, J.P.; Fontana, F.; Faessler, M.; Forster, C.; Schmidhuber, J.; Di Caro, G.; et al.
A Machine Learning Approach to Visual Perception of Forest Trails for Mobile Robots. IEEE Robot. Autom. Lett.
2016
, 1, 661–667.
[CrossRef]
11.
Elsisi, M.; Mahmoud, K.; Lehtonen, M.; Darwish, M.M.F. Effective Nonlinear Model Predictive Control Scheme Tuned by
Improved NN for Robotic Manipulators. IEEE Access 2021, 9, 64278–64290. [CrossRef]
12.
Elsisi, M.; Mahmoud, K.; Lehtonen, M.; Darwish, M.M.F. An improved neural network algorithm to efficiently track various
trajectories of robot manipulator arms. IEEE Access 2021, 9, 11911–11920. [CrossRef]
13.
A Brief History of Collaborative Robots|Material Handling and Logistics. Available online: https://www.mhlnews.com/
technology-automation/article/21124077/a-brief-history-of-collaborative-robots (accessed on 8 April 2021).
14. Colgate, J.E.; Peshkin, M.A. Cobots. U.S. Patent 5,952,796, 14 September 1999.
15.
Galin, R.; Meshcheryakov, R. Automation and robotics in the context of Industry 4.0: The shift to collaborative robots. IOP Conf.
Ser. Mater. Sci. Eng. 2019, 537, 032073. [CrossRef]
16.
Tran, M.Q.; Elsisi, M.; Mahmoud, K.; Liu, M.K.; Lehtonen, M.; Darwish, M.M.F. Experimental Setup for Online Fault Diagnosis
of Induction Machines via Promising IoT and Machine Learning: Towards Industry 4.0 Empowerment. IEEE Access
2021
, 9,
115429–115441. [CrossRef]
17.
Elsisi, M.; Mahmoud, K.; Lehtonen, M.; Darwish, M.M.F. Reliable Industry 4.0 Based on Machine Learning and IoT for Analyzing,
Monitoring, and Securing Smart Meters. Sensors 2021, 21, 487. [CrossRef]
18. Rao, S.K.; Prasad, R. Impact of 5G Technologies on Industry 4.0. Wirel. Pers. Commun. 2018, 100, 145–159. [CrossRef]
19.
Pérez, L.; Rodríguez-Jiménez, S.; Rodríguez, N.; Usamentiaga, R.; García, D.F.; Wang, L. Symbiotic human–robot collaborative
approach for increased productivity and enhanced safety in the aerospace manufacturing industry. Int. J. Adv. Manuf. Technol.
2020, 106, 851–863. [CrossRef]
20.
Song, J.; Chen, Q.; Li, Z. A peg-in-hole robot assembly system based on Gauss mixture model. Robot. Comput. Integr. Manuf.
2021
,
67, 101996. [CrossRef]

Appl. Sci. 2022, 12, 135 22 of 25
21.
De Pace, F.; Manuri, F.; Sanna, A.; Fornaro, C. A systematic review of Augmented Reality interfaces for collaborative industrial
robots. Comput. Ind. Eng. 2020, 149, 106806. [CrossRef]
22.
Matheson, E.; Minto, R.; Zampieri, E.G.G.; Faccio, M.; Rosati, G. Human-robot collaboration in manufacturing applications: A
review. Robotics 2019, 8, 100. [CrossRef]
23.
ISO—ISO/TS 15066:2016—Robots and Robotic Devices—Collaborative Robots. Available online: https://www.iso.org/standard/
62996.html (accessed on 2 December 2021).
24.
Tannous, M.; Miraglia, M.; Inglese, F.; Giorgini, L.; Ricciardi, F.; Pelliccia, R.; Milazzo, M.; Stefanini, C. Haptic-based touch
detection for collaborative robots in welding applications. Robot. Comput. Integr. Manuf. 2020, 64, 101952. [CrossRef]
25.
Tannous, M.; Bologna, F.; Stefanini, C. Load cell torques and force data collection during tele-operated robotic gas tungsten arc
welding in presence of collisions. Data Br. 2020, 31, 105981. [CrossRef]
26.
Knudsen, M.; Kaivo-oja, J. Collaborative Robots: Frontiers of Current Literature. J. Intell. Syst. Theory Appl.
2020
, 3, 13–20.
[CrossRef]
27.
Ghosh, A.; Soto, D.A.P.; Veres, S.M.; Rossiter, A. Human robot interaction for future remote manipulations in industry 4.0. Proc.
IFAC-Pap. 2020, 53, 10223–10228. [CrossRef]
28.
Ghosh, A.; Veres, S.M.; Paredes-Soto, D.; Clarke, J.E.; Rossiter, J.A. Intuitive programming with remotely instructed robots inside
future gloveboxes. In Proceedings of the ACM/IEEE International Conference on Human-Robot Interaction, Cambridge, UK,
23–26 March 2020; pp. 209–211.
29.
Weidemann, A.; Rußwinkel, N. The Role of Frustration in Human–Robot Interaction—What Is Needed for a Successful Collabo-
ration? Front. Psychol. 2021, 12, 707. [CrossRef]
30.
Spezialetti, M.; Placidi, G.; Rossi, S. Emotion Recognition for Human-Robot Interaction: Recent Advances and Future Perspectives.
Front. Robot. AI 2020, 7, 532279. [CrossRef] [PubMed]
31.
Ge, S.; Wang, P.; Liu, H.; Lin, P.; Gao, J.; Wang, R.; Iramina, K.; Zhang, Q.; Zheng, W. Neural Activity and Decoding of Action
Observation Using Combined EEG and fNIRS Measurement. Front. Hum. Neurosci. 2019, 13, 357. [CrossRef] [PubMed]
32.
Mavridis, N. A review of verbal and non-verbal human–robot interactive communication. Robot. Auton. Syst.
2015
, 63, 22–35.
[CrossRef]
33.
Dzedzickis, A.; Kaklauskas, A.; Bucinskas, V. Human emotion recognition: Review of sensors and methods. Sensors
2020
, 20, 592.
[CrossRef] [PubMed]
34.
Shubha, P. International Journal of Engineering Technology Research & Management: A review of multi object recognition based
on deep learining. Int. J. Eng. Technol. Res. Manag. 2020, 2, 27–33.
35.
De Coninck, E.; Verbelen, T.; Van Molle, P.; Simoens, P.; Dhoedt, B. Learning robots to grasp by demonstration. Robot. Auton. Syst.
2020, 127, 103474. [CrossRef]
36.
Fujita, M.; Domae, Y.; Noda, A.; Garcia Ricardez, G.A.; Nagatani, T.; Zeng, A.; Song, S.; Rodriguez, A.; Causo, A.; Chen, I.M.; et al.
What are the important technologies for bin picking? Technology analysis of robots in competitions based on a set of performance
metrics. Adv. Robot. 2020, 34, 560–574. [CrossRef]
37.
Sughashini, K.R.; Sunanthini, V.; Johnsi, J.; Nagalakshmi, R.; Sudha, R. A pneumatic robot arm for sorting of objects with
chromatic sensor module. Mater. Today Proc. 2021, 45, 6364–6368. [CrossRef]
38.
Shaikat, A.S.; Akter, S.; Salma, U. Computer Vision Based Industrial Robotic Arm for Sorting Objects by Color and Height. J. Eng.
Adv. 2020, 1, 116–122. [CrossRef]
39. Chen, P.; Elangovan, V. Object Sorting using Faster R-CNN. Int. J. Artif. Intell. Appl. 2020, 11, 27–36. [CrossRef]
40.
Yu, Y.; Zou, S.; Yin, K. A novel detection fusion network for solid waste sorting. Int. J. Adv. Robot. Syst.
2020
, 17, 172988142094177.
[CrossRef]
41.
Xiao, W.; Yang, J.; Fang, H.; Zhuang, J.; Ku, Y.; Zhang, X. Development of an automatic sorting robot for construction and
demolition waste. Clean Technol. Environ. Policy 2020, 22, 1829–1841. [CrossRef]
42.
Li, M.; Duan, Y.; He, X.; Yang, M. Image positioning and identification method and system for coal and gangue sorting robot. Int.
J. Coal Prep. Util. 2020, 1–19. [CrossRef]
43.
D’Avella, S.; Tripicchio, P.; Avizzano, C.A. A study on picking objects in cluttered environments: Exploiting depth features for a
custom low-cost universal jamming gripper. Robot. Comput. Integr. Manuf. 2020, 63, 101888. [CrossRef]
44.
Ciszak, O.; Juszkiewicz, J.; Suszy´nski, M. Programming of Industrial Robots Using the Recognition of Geometric Signs in Flexible
Welding Process. Symmetry 2020, 12, 1429. [CrossRef]
45.
Minoura, H.; Yonetani, R.; Nishimura, M.; Ushiku, Y. Crowd Density Forecasting by Modeling Patch-Based Dynamics. IEEE
Robot. Autom. Lett. 2021, 6, 287–294. [CrossRef]
46.
De Coninck, E.; Verbelen, T.; Van Molle, P.; Simoens, P.; Idlab, B.D. Learning to Grasp Arbitrary Household Objects from a Single
Demonstration. IEEE Int. Conf. Intell. Robot. Syst. 2019, 2372–2377. [CrossRef]
47.
Kaya, O.; Ta˘glıo˘glu, G.B.; Ertu˘grul, ¸S. The Series Elastic Gripper Design, Object Detection, and Recognition by Touch. J. Mech.
Robot. 2022, 14, 014501. [CrossRef]
48.
Kulkarni, R.G. Robot Path Planning with Sensor Feedback for Industrial Applications; Wichita State University: Wichita, KS, USA, 2021.
49.
Abdalrahman, M.; Brice, A.; Hanson, L. New Era of Automation in Scania’ s Manufacturing Systems—A Method to Automate a Manual
Assembly Process; Libraries at Lund University: Lund, Sweden, 2021.

Appl. Sci. 2022, 12, 135 23 of 25
50.
Thike, A.; Moe San, Z.Z.; Min Oo, D.Z. Design and Development of an Automatic Color Sorting Machine on Belt Conveyor. Int. J.
Sci. Eng. Appl. 2019, 8, 176–179. [CrossRef]
51.
Wang, Z.; Xie, S.; Chen, G.; Chi, W.; Ding, Z.; Wang, P. An Online Flexible Sorting Model for Coal and Gangue Based on
Multi-Information Fusion. IEEE Access 2021, 9, 90816–90827. [CrossRef]
52.
Sun, Z.; Huang, L.; Jia, R. Coal and gangue separating robot system based on computer vision. Sensors
2021
, 21, 1349. [CrossRef]
[PubMed]
53.
Fadhil, A.T.; Abbar, K.A.; Qusay, A.M. Computer Vision-Based System for Classification and Sorting Color Objects. IOP Conf. Ser.
Mater. Sci. Eng. 2020, 745, 012030. [CrossRef]
54.
Peršak, T.; Viltužnik, B.; Hernavs, J.; Klancnik, S. Vision-Based Sorting Systems for Transparent Plastic Granulate. Appl. Sci.
2020
,
10, 4269. [CrossRef]
55.
Sun, L.; Zhao, C.; Yan, Z.; Liu, P.; Duckett, T.; Stolkin, R. A novel weakly-supervised approach for RGB-D-based nuclear waste
object detection. IEEE Sens. J. 2019, 19, 3487–3500. [CrossRef]
56.
Albinali, H.; Alzahrani, F.A. Faster R-CNN for detecting regions in human-annotated micrograph images. In Proceedings of the
2021 International Conference of Women in Data Science at Taif University (WiDSTaif), Taif, Saudi Arabia, 30–31 March 2021.
57.
Li, S.; Zhao, X.; Li, W. Analysis of Object Detection Performance Based on Faster R-CNN. J. Phys. Conf. Ser.
2021
, 1827, 012085.
[CrossRef]
58.
Cipta Ramadhan Kete, S.; Darma Tarigan, S.; Effendi, H. Land use classification based on object and pixel using Landsat 8 OLI in
Kendari City, Southeast Sulawesi Province, Indonesia. IOP Conf. Ser. Earth Environ. Sci. 2019, 284, 012019. [CrossRef]
59.
Hespeler, S.C.; Nemati, H.; Dehghan-Niri, E. Non-destructive thermal imaging for object detection via advanced deep learning
for robotic inspection and harvesting of chili peppers. Artif. Intell. Agric. 2021, 5, 102–117. [CrossRef]
60.
Birglen, L.; Schlicht, T. A statistical review of industrial robotic grippers. Robot. Comput. Integr. Manuf.
2018
, 49, 88–97. [CrossRef]
61.
Shim, M.; Kim, J.H. Design and optimization of a robotic gripper for the FEM assembly process of vehicles. Mech. Mach. Theory
2018, 129, 1–16. [CrossRef]
62.
Linghu, C.; Zhang, S.; Wang, C.; Yu, K.; Li, C.; Zeng, Y.; Zhu, H.; Jin, X.; You, Z.; Song, J. Universal SMP gripper with massive and
selective capabilities for multiscaled, arbitrarily shaped objects. Sci. Adv. 2020, 6, eaay5120. [CrossRef] [PubMed]
63.
Richter, F.; Orosco, R.K.; Yip, M.C. Open-Sourced Reinforcement Learning Environments for Surgical Robotics. arXiv
2019
,
arXiv:1903.02090.
64.
Kassahun, Y.; Yu, B.; Tibebu, A.T.; Stoyanov, D.; Giannarou, S.; Metzen, J.H.; Vander Poorten, E. Surgical robotics beyond enhanced
dexterity instrumentation: A survey of machine learning techniques and their role in intelligent and autonomous surgical actions.
Int. J. Comput. Assist. Radiol. Surg. 2016, 11, 553–568. [CrossRef] [PubMed]
65. Pierson, H.A.; Gashler, M.S. Deep learning in robotics: A review of recent research. Adv. Robot. 2017, 31, 821–835. [CrossRef]
66.
Downey, J.E.; Weiss, J.M.; Muelling, K.; Venkatraman, A.; Valois, J.S.; Hebert, M.; Bagnell, J.A.; Schwartz, A.B.; Collinger, J.L.
Blending of brain-machine interface and vision-guided autonomous robotics improves neuroprosthetic arm performance during
grasping. J. Neuroeng. Rehabil. 2016, 13, 28. [CrossRef]
67.
Fong, J.; Ocampo, R.; Gross, D.P.; Tavakoli, M. Intelligent Robotics Incorporating Machine Learning Algorithms for Improving
Functional Capacity Evaluation and Occupational Rehabilitation. J. Occup. Rehabil. 2020, 30, 362–370. [CrossRef] [PubMed]
68.
Rudovic, O.; Lee, J.; Dai, M.; Schuller, B.; Picard, R.W. Personalized machine learning for robot perception of affect and engagement
in autism therapy. Sci. Robot. 2018, 3, eaao6760. [CrossRef]
69.
Grischke, J.; Johannsmeier, L.; Eich, L.; Griga, L.; Haddadin, S. Dentronics: Towards robotics and artificial intelligence in dentistry.
Dent. Mater. 2020, 36, 765–778. [CrossRef]
70.
Ma, Q.; Kobayashi, E.; Wang, J.; Hara, K.; Suenaga, H.; Sakuma, I.; Masamune, K. Development and preliminary evaluation of an
autonomous surgical system for oral and maxillofacial surgery. Int. J. Med. Robot. Comput. Assist. Surg.
2019
, 15, e1997. [CrossRef]
71.
Otani, T.; Raigrodski, A.J.; Mancl, L.; Kanuma, I.; Rosen, J.
In vitro
evaluation of accuracy and precision of automated robotic
tooth preparation system for porcelain laminate veneers. J. Prosthet. Dent. 2015, 114, 229–235. [CrossRef]
72.
Lang, T.; Staufer, S.; Jennes, B.; Gaengler, P. Clinical validation of robot simulation of toothbrushing—Comparative plaque
removal efficacy. BMC Oral Health 2014, 14, 82. [CrossRef]
73.
Nelson, C.A.; Hossain, S.G.M.; Al-Okaily, A.; Ong, J. A novel vending machine for supplying root canal tools during surgery. J.
Med. Eng. Technol. 2012, 36, 102–116. [CrossRef] [PubMed]
74.
Lepidi, L.; Chen, Z.; Ravida, A.; Lan, T.; Wang, H.L.; Li, J. A Full-Digital Technique to Mount a Maxillary Arch Scan on a Virtual
Articulator. J. Prosthodont. 2019, 28, 335–338. [CrossRef]
75.
Zhang, Y.; De Jiang, J.G.; Liang, T.; Hu, W.P. Kinematics modeling and experimentation of the multi-manipulator tooth-
arrangement robot for full denture manufacturing. J. Med. Syst. 2011, 35, 1421–1429. [CrossRef] [PubMed]
76.
Spin-Neto, R.; Mudrak, J.; Matzen, L.H.; Christensen, J.; Gotfredsen, E.; Wenzel, A. Cone beam CT image artefacts related to
head motion simulated by a robot skull: Visual characteristics and impact on image quality. Dentomaxillofacial Radiol.
2013
, 42,
32310645. [CrossRef]
77.
Li, C.; Gu, X.; Xiao, X.; Lim, C.M.; Duan, X.; Ren, H. A Flexible Transoral Robot Towards COVID-19 Swab Sampling. Front. Robot.
AI 2021, 8, 51. [CrossRef]
78.
Jose, K.; Pratihar, D.K. Task allocation and collision-free path planning of centralized multi-robots system for industrial plant
inspection using heuristic methods. Rob. Auton. Syst. 2016, 80, 34–42. [CrossRef]

Appl. Sci. 2022, 12, 135 24 of 25
79.
Das, P.K.; Jena, P.K. Multi-robot path planning using improved particle swarm optimization algorithm through novel evolutionary
operators. Appl. Soft Comput. J. 2020, 92, 106312. [CrossRef]
80.
Fascista, A.; Coluccia, A.; Ricci, G. A Pseudo Maximum likelihood approach to position estimation in dynamic multipath
environments. Signal Processing 2021, 181, 107907. [CrossRef]
81.
Karaagac, A.; Haxhibeqiri, J.; Ridolfi, M.; Joseph, W.; Moerman, I.; Hoebeke, J. Evaluation of accurate indoor localization systems
in industrial environments. In Proceedings of the 2017 22nd IEEE International Conference on Emerging Technologies and
Factory Automation (ETFA), Limassol, Cyprus, 12–15 September 2017; pp. 1–8.
82.
Makomo, T.J.; Erin, K.; Boru, B. Real Time Application for Automatic Object and 3D Position Detection and Sorting with Robotic
Manipulator. Sak. Univ. J. Sci. 2020, 24, 703–711. [CrossRef]
83.
Hermansson, T.; Carlson, J.S.; Linn, J.; Kressin, J. Quasi-static path optimization for industrial robots with dress packs. Robot.
Comput. Integr. Manuf. 2021, 68, 102055. [CrossRef]
84.
Nguyen, V.; Melkote, S. Hybrid statistical modelling of the frequency response function of industrial robots. Robot. Comput. Integr.
Manuf. 2021, 70, 102134. [CrossRef]
85.
Jiao, J.; Tian, W.; Zhang, L.; Li, B.; Hu, J.; Li, Y.; Li, D.; Zhang, J. Variable stiffness identification and configuration optimization of
industrial robots for machining tasks. Res. Sq. 2020. [CrossRef]
86.
Ding, L.; Jiang, W.; Zhou, Y.; Zhou, C.; Liu, S. BIM-based task-level planning for robotic brick assembly through image-based 3D
modeling. Adv. Eng. Inform. 2020, 43, 100993. [CrossRef]
87.
Leroux, M.; Raison, M.; Adadja, T.; Achiche, S. Combination of eyetracking and computer vision for robotics control. In
Proceedings of the IEEE Conference on Technologies for Practical Robot Applications, TePRA, Woburn, MA, USA,
11–12 May 2015
;
IEEE Computer Society: Washington, DC, USA, 2015.
88.
Xu, Y.; Fang, G.; Lv, N.; Chen, S.; Jia Zou, J. Computer vision technology for seam tracking in robotic GTAW and GMAW. Robot.
Comput. Integr. Manuf. 2015, 32, 25–36. [CrossRef]
89.
Rojas, R.A.; Garcia, M.A.R.; Gualtieri, L.; Rauch, E. Combining safety and speed in collaborative assembly systems—An approach
to time optimal trajectories for collaborative robots. Procedia CIRP 2021, 97, 308–312. [CrossRef]
90.
Roveda, L.; Magni, M.; Cantoni, M.; Piga, D.; Bucca, G. Human–robot collaboration in sensorless assembly task learning enhanced
by uncertainties adaptation via Bayesian Optimization. Rob. Auton. Syst. 2021, 136, 103711. [CrossRef]
91.
Fu, G.; Gu, T.; Gao, H.; Lu, C. A postprocessing and path optimization based on nonlinear error for multijoint industrial
robot-based 3D printing. Int. J. Adv. Robot. Syst. 2020, 17, 172988142095224. [CrossRef]
92.
Cvitanic, T.; Nguyen, V.; Melkote, S.N. Pose optimization in robotic machining using static and dynamic stiffness models. Robot.
Comput. Integr. Manuf. 2020, 66, 101992. [CrossRef]
93.
Wang, Z.; Zhang, R.; Keogh, P. Real-Time Laser Tracker Compensation of Robotic Drilling and Machining. J. Manuf. Mater. Process.
2020, 4, 79. [CrossRef]
94.
Schultz, U.P. Reversible control of robots. In Reversible Computation: Extending Horizons of Computing. RC 2020. Lecture Notes in
Computer Science); Ulidowski, I., Lanese, I., Schultz, U., Ferreira, C., Eds.; Springer: Berlin/Heidelberg, Germany, 2020; Volume
12070, pp. 177–186. [CrossRef]
95.
Jiang, J.; Huang, Z.; Bi, Z.; Ma, X.; Yu, G. State-of-the-Art control strategies for robotic PiH assembly. Robot. Comput. Integr. Manuf.
2020, 65, 101894. [CrossRef]
96.
Kumar, S.; Singhal, P.; Krovi, V.N. Computer-vision-based decision support in surgical robotics. IEEE Des. Test
2015
, 32, 89–97.
[CrossRef]
97.
Bader, F.; Rahimifard, S. Challenges for industrial robot applications in food manufacturing. In Proceedings of the 2nd Interna-
tional Symposium on Computer Science and Intelligent Control, Stockholm, Sweden, 21–23 September 2018.
98.
Grobbelaar, W.; Verma, A.; Shukla, V.K. Analyzing human robotic interaction in the food industry. J. Phys. Conf. Ser.
2021
, 1714,
012032. [CrossRef]
99.
Sandey, K.K.; Qureshi, M.A.; Meshram, B.D.; Agrawal, A.; Uprit, S. Robotics—An Emerging Technology in Dairy Industry. Int. J.
Eng. Trends Technol. 2017, 43, 58–62.
100. Wang, Z.; Or, K.; Hirai, S. A dual-mode soft gripper for food packaging. Rob. Auton. Syst. 2020, 125, 103427. [CrossRef]
101.
Blöcher, K.; Alt, R. AI and robotics in the European restaurant sector: Assessing potentials for process innovation in a high-contact
service industry. Electron. Mark. 2020, 31, 529–551. [CrossRef]
102.
Bader, F.; Rahimifard, S. A methodology for the selection of industrial robots in food handling. Innov. Food Sci. Emerg. Technol.
2020, 64, 102379. [CrossRef]
103.
Boschetti, G.; Carbone, G. Advances in Italian Mechanism Science; Springer: Cham, Switzerland, 2017; Volume 18, ISBN 9783030558062.
104.
Zhang, B.; Xie, Y.; Zhou, J.; Wang, K.; Zhang, Z. State-of-the-art robotic grippers, grasping and control strategies, as well as their
applications in agricultural robots: A review. Comput. Electron. Agric. 2020, 177, 105694. [CrossRef]
105.
Chang, C.-L.; Lin, K.-M. Smart Agricultural Machine with a Computer Vision-Based Weeding and Variable-Rate Irrigation
Scheme. Robotics 2018, 7, 38. [CrossRef]
106.
Patrício, D.I.; Rieder, R. Computer vision and artificial intelligence in precision agriculture for grain crops: A systematic review.
Comput. Electron. Agric. 2018, 153, 69–81. [CrossRef]
107.
Tankova, T.; da Silva, L.S. Robotics and Additive Manufacturing in the Construction Industry. Curr. Robot. Rep.
2020
, 1, 13–18.
[CrossRef]

Appl. Sci. 2022, 12, 135 25 of 25
108.
Davila Delgado, J.M.; Oyedele, L.; Ajayi, A.; Akanbi, L.; Akinade, O.; Bilal, M.; Owolabi, H. Robotics and automated systems in
construction: Understanding industry-specific challenges for adoption. J. Build. Eng. 2019, 26, 100868. [CrossRef]
109.
Robinson, G. Global Construction Market to Grow $8 Trillion by 2030: Driven by China, US and India; Global Construction Perspectives
and Oxford Economics: London, UK, 2016; Volume 44, pp. 1–3.
110.
Aparicio, C.C.; Balzan, A.; Trabucco, D. Robotics in construction: Framework and future directions. Int. J. High-Rise Build.
2020
, 9,
105–111.
111.
Follini, C.; Magnago, V.; Freitag, K.; Terzer, M.; Marcher, C.; Riedl, M.; Giusti, A.; Matt, D.T. Bim-integrated collaborative robotics
for application in building construction and maintenance. Robotics 2021, 10, 2. [CrossRef]
112.
Parascho, S.; Han, I.X.; Walker, S.; Beghini, A.; Bruun, E.P.G.; Adriaenssens, S. Robotic vault: A cooperative robotic assembly
method for brick vault construction. Constr. Robot. 2020, 4, 117–126. [CrossRef]
113.
Kazemian, A.; Yuan, X.; Davtalab, O.; Khoshnevis, B. Computer vision for real-time extrusion quality monitoring and control in
robotic construction. Autom. Constr. 2019, 101, 92–98. [CrossRef]
114.
Gautam, M.; Fagerlund, H.; Greicevci, B.; Christophe, F.; Havula, J. Collaborative Robotics in Construction: A Test Case on
Screwing Gypsum Boards on Ceiling. In Proceedings of the 2020 5th International Conference on Green Technology and
Sustainable Development, Ho Chi Minh City, Vietnam, 27–28 November 2020; pp. 88–93.
115.
Balzan, A.; Aparicio, C.C.; Trabucco, D. Robotics in construction: State-of-art of on-site advanced devices. Int. J. High-Rise Build.
2020, 9, 95–104.
116.
Ghasempourabadi, M.; Taraz, M. Human-robot interaction in construction: A literature review. Malays. J. Sustain. Environ.
2021
,
8, 49–74.
117.
Bodea, S.; Mindermann, P.; Gresser, G.T.; Menges, A. Additive Manufacturing of Large Coreless Filament Wound Composite
Elements for Building Construction. 3D Print. Addit. Manuf. 2021; ahead of print. [CrossRef]
118.
Zhang, M.; Yan, J. A data-driven method for optimizing the energy consumption of industrial robots. J. Clean. Prod.
2021
, 285, 124862.
[CrossRef]
119. Aksoy, S.; Ozan, E. Robots and Their Applications. Int. Res. J. Eng. Technol. 2020. [CrossRef]
